

Section: New Results
Multi-UAV exploration and communication
Multi-UAV Exploration and Visual Coverage of 3D Environments
Participants : Alessandro Renzaglia, Olivier Simonin, Jilles Dibangoye, Vincent Le Doze.
|


Multi-robot teams, especially when involving aerial vehicles (UAVs (Unmanned Aerial Vehicles)), are extremely efficient systems to help humans in acquiring information on large and complex environments. In these scenarios, two fundamental tasks are static coverage and exploration. In both cases, the robots' goal is to navigate through the environment and cooperate to maximize the observed area, either by finding the optimal static configuration which provides the best global view in the case of the coverage or by maximizing the new observed areas at every step until the environment becomes completely known in the case of the exploration.
Although these tasks are usually considered separately in the literature, we proposed a common framework where both problems are formulated as the maximization of online acquired information via the definition of single-robot optimization functions, which differs only slightly in the two cases to take into account the static and dynamic nature of coverage and exploration respectively (A. Renzaglia, J. Dibangoye, V. Le Doze and O. Simonin, "A Common Optimization Framework for Multi-Robot Exploration and Coverage in 3D Environments," sumbitted to Journal of Intelligent & Robotic Systems, under review.). A common derivative-free approach based on a stochastic approximation of these functions and their successive optimization is proposed, resulting in a fast and decentralized solution. The locality of this methodology limits however this solution to have local optimality guarantees and specific additional layers are proposed for the two problems to improve the final performance.
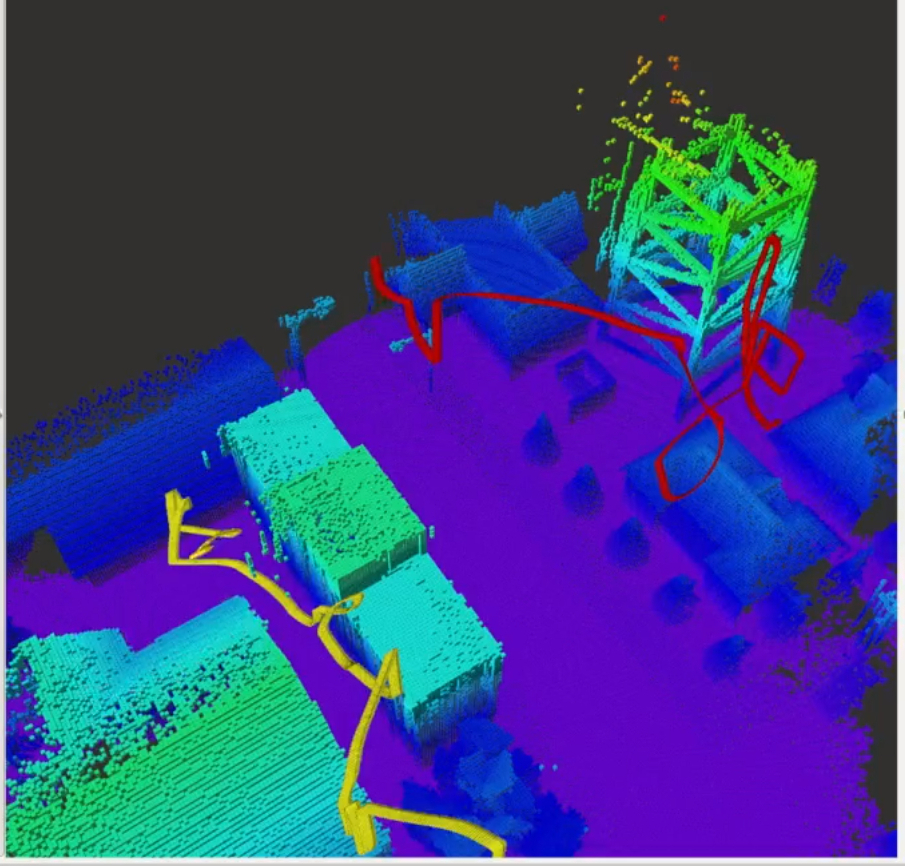
For the exploration problem, this resulted in a novel decentralized approach which alternates gradient-free stochastic optimization and a frontier-based approach [42] (IROS'19), [47]. Our method allows each robot to generate its own trajectory based on the collected data and the local map built integrating the information shared by its teammates. Whenever a local optimum is reached, which corresponds to a location surrounded by already explored areas, the algorithm identifies the closest frontier to get over it and restarts the local optimization. Its low computational cost, the capability to deal with constraints and the decentralized decision-making make it particularly suitable for multi-robot applications in complex 3D environments.
In the case of visual coverage, we studied how suitable initializations for the UAVs' positions can be computed offline based on a partial knowledge on the environment and how they can affect the final performance of the online measurements-based optimization. The main contribution of this work was thus to add another layer, based on the concept of Centroidal Voronoi Tessellation, to the optimization scheme in order to exploit an a priori sparse information on the environment to cover. The resulting method, taking advantages of the complementary properties of geometric and stochastic optimization, significantly improves the result of the uninitialized solution and notably reduces the probability of a far-to-optimal final configuration. Moreover, the number of iterations necessary for the convergence of the on-line algorithm is also reduced [88].
Both previous approaches have been tested in realistic simulations based on our extension of Gazebo, called SimuDronesGR (see Fig. 21.a). The development of this UAVs simulator, which includes realistic models of both the environment and the aerial vehicle's dynamics and sensors, is an important current activity in Chroma. Such a simulator has the fundamental role of allowing for realistic tests to validate the developed algorithms and to better prepare the implementation of these solutions on the robotic platform of the team (Intel Aero quadrotors, Fig. 21.b) for real experiments.
Communication-based control of swarm of UAVs
Participants : Remy Grunblatt, Olivier Simonin, Isabelle Guerin-Lassous [Inria/Lyon 1 Dante team] , Alexandre Bonnefond.
Intel WiFi controllers are used in many common devices, such as laptops, but also in the Intel Aero Ready-to-Fly UAVs (Unmanned Aerial Vehicle). The mobility capabilities of these devices lead to greater dynamics in radio conditions, and therefore introduce a need for a suitable and efficient rate adaptation algorithm. In the context of the PhD of Remy Grunblatt, we have reverse-engineered the Intel rate adaptation mechanism from the source code of the IwlWifi Linux driver, and we have given, in a comprehensive form, the underlying rate adaptation algorithm named Iwl-Mvm-Rs. We have also implemented the Iwl-Mvm-Rs algorithm in the NS-3 simulator. Thanks to this implementation, we can evaluate the performance of Iwl-Mvm-Rs in different scenarios (static and with mobility, with and without fast fading). We also compared the performances of Iwl-Mvm-Rs with the ones of Minstrel-HT and IdealWifi, also implemented in the NS-3 simulator. This work has been published in ACM MSWiM conference (A) [36].
In the end of 2019, we obtained a DGA/Inria AI project, called "Dynaflock", aiming to extend the flocking approach to control swarm of communicating UAVs. Alexandre Bonnefond started a PhD to elaborate dynamic flocking models based on the link quality, which can be measured online.
Ultra-WideBand based localization & control of micro-UAVs fleets
Participants : Stephane d'Alu, Olivier Simonin, Oana Iova [Inria/INSA Agora team] , Hervé Rivano [Inria/INSA Agora team] .
The literature on autonomous flight of swarm of UAVs in indoor environments shows it requires the use of an external camera-based localization, i.e. a motion capture system. Indoor flying without such an expensive equipment installed in the infrastructure remains a challenge. To tackle this challenge, we investigate the Ultra-WideBand technology which can be embedded on micro UAVs as a way to estimate inter-drone distances (see Fig. 21.c Crazyflie micro-UAV). In our approach, the distance information is a fundamental building block to perform a self-maintaining formation flight. We defined and experimented a time-of-flight distance computation, using UWB decawave chips. We showed a Crazyflie flying and computing its position in function of three fixed anchors. We also tested a two-UAV flight where inter-distance is measured to avoid collisions. See first results in [33].