Section: New Results
A vehicle dynamic model corrector with side slip estimation for adding safety capabilities in autonomous vehicle
Participants : Imane Mahtout, Fawzi Nashashibi.
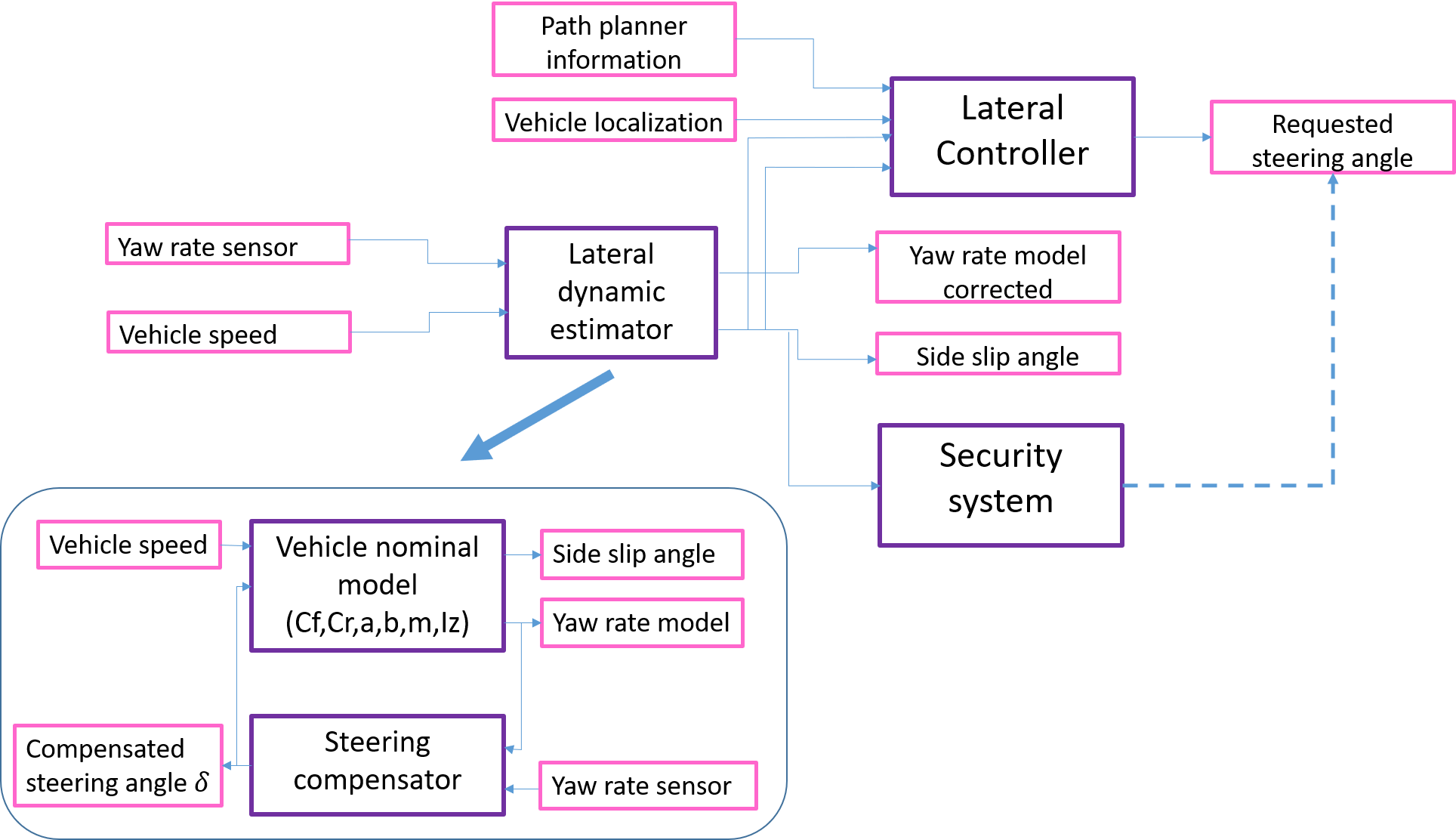
The ability to identify malfunctions on autonomous vehicles is critical for their deployment. As a matter of fact, systems able to identify when the positioning systems are not providing accurate data, or the perception algorithms are not properly detecting the environment, are extremely important to assure a certain safety level for automated vehicles. This is especially true since these systems are finally connected to the control module that provides the adequate commands to vehicle’s actuators. For control algorithms to work properly, proper inputs are necessary to reduce noise, increase controllability and avoid system’s malfunctions and instability. It is also critical for these algorithms to identify/consider vehicle physical limits for determining when is the automated system still capable of handling the vehicle. From the above, it is clear that automated vehicles are in need of proper inputs to control the vehicle, but also it is necessary to detect critical situations where the nominal control behavior is no longer assured, in order to take the vehicle to a safe state. Slide slip state is an example of a critical situation where the vehicle is no longer able to correct its trajectory. Thus, this part of my thesis work consists on developing a module for providing smooth signals to the controller and, at the same time, detect side slip situations. The lateral controller implemented in our automated driving (AD) system is based on the yaw error minimization between the desired yaw rate (obtained from the road layout information in function of the curvature) and the current vehicle yaw rate. From this, the first step is to provide a proper current yaw rate measurement. The proposed device compares the measured yaw rate value (coming from the vehicle sensor) with a model-based estimated yaw rate value. The idea is to identify vehicle model mismatches, correcting the model in real time. This permits to extend the nominal vehicle planar model to a road layout-independent model, where roll and pitch variations are considered. This first stage consists of a vehicle model compensator that includes unmodeled vehicle dynamics and parameter incertitude in real time when the vehicle is operating in autonomous mode. The vehicle lateral controller is then fed by the compensator output to allow robust performance in all road conditions. Once lateral control is fed with proper inputs, the second stage is the one detecting that vehicle handling physical limits are surpassed. The proposed system based on Youla-Kucera parametrization identifies the vehicle physical limits by estimating front and rear lateral forces, using as input the previous corrected model and on-board vehicle info. This permits to provide an accurate identification of slide slip vehicle states without adding any additional sensor to production vehicle’s on-board sensors (see Fig. 1).