Section: New Results
Visual Recognition and Robotics
|
Learning Disentangled Representations with Reference-Based Variational Autoencoders
Participants : Adria Ruiz, Oriol Martinez, Xavier Binefa, Jakob Verbeek.
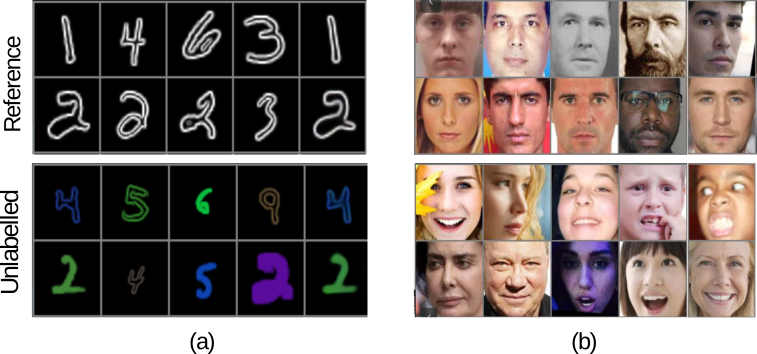
Learning disentangled representations from visual data, where different high-level generative factors are independently encoded, is of importance for many computer vision tasks. Supervised approaches, however, require a significant annotation effort in order to label the factors of interest in a training set. To alleviate the annotation cost, in [32] we introduce a learning setting which we refer to as “reference-based disentangling”. Given a pool of unlabelled images, the goal is to learn a representation where a set of target factors are disentangled from others. The only supervision comes from an auxiliary “reference set” that contains images where the factors of interest are constant. See Fig. 1 for illustrative examples. In order to address this problem, we propose reference-based variational autoencoders, a novel deep generative model designed to exploit the weak supervisory signal provided by the reference set. During training, we use the variational inference framework where adversarial learning is used to minimize the objective function. By addressing tasks such as feature learning, conditional image generation or attribute transfer, we validate the ability of the proposed model to learn disentangled representations from minimal supervision.
Tensor Decomposition and Non-linear Manifold Modeling for 3D Head Pose Estimation
Participants : Dmytro Derkach, Adria Ruiz, Federico M. Sukno.
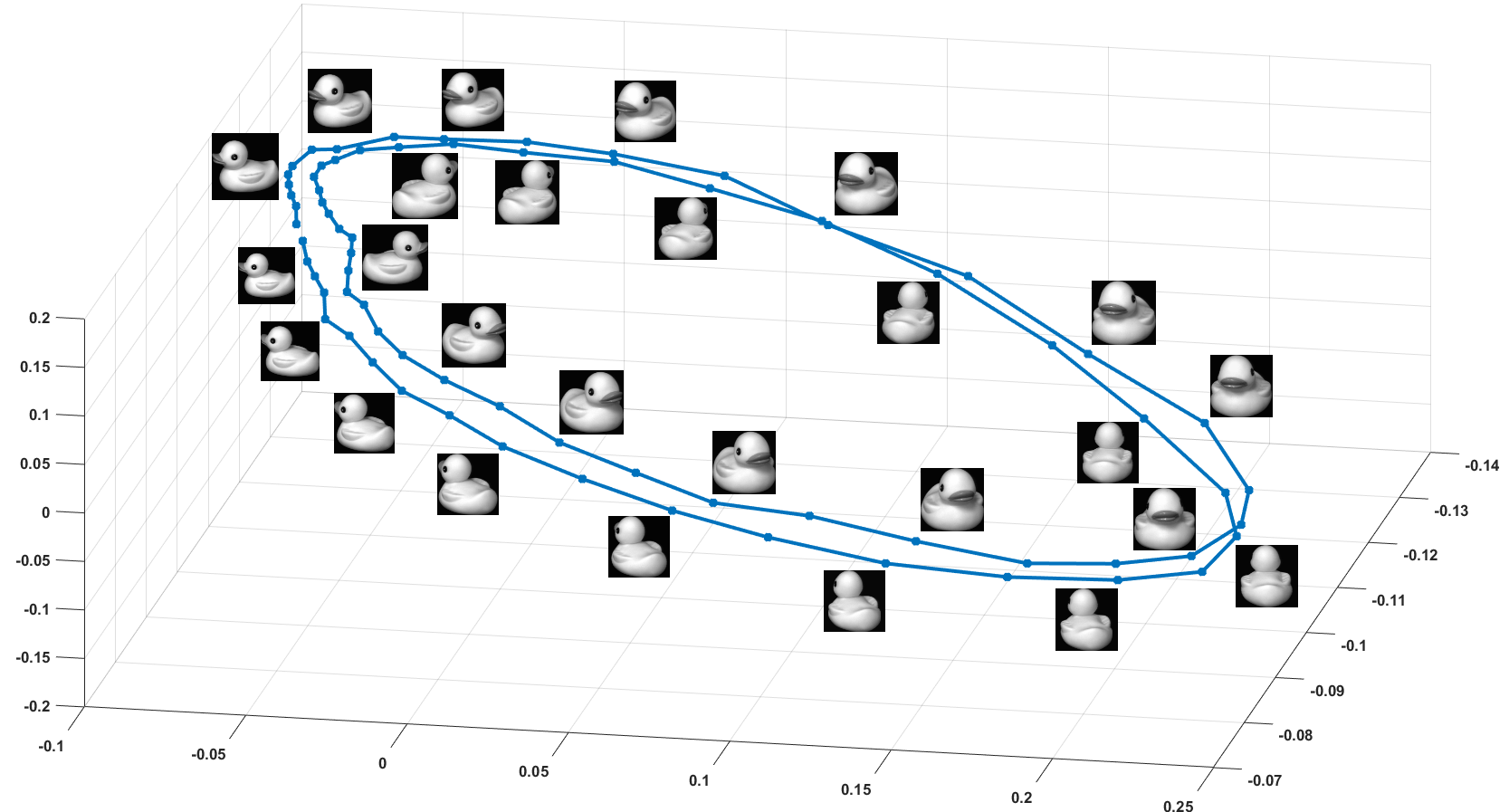
Head pose estimation is a challenging computer vision problem with important applications in different scenarios such as human-computer interaction or face recognition. In [5], we present a 3D head pose estimation algorithm based on non-linear manifold learning. A key feature of the proposed approach is that it allows modeling the underlying 3D manifold that results from the combination of rotation angles. To do so, we use tensor decomposition to generate separate subspaces for each variation factor and show that each of them has a clear structure that can be modeled with cosine functions from a unique shared parameter per angle (see Fig. 2). Such representation provides a deep understanding of data behavior. We show that the proposed framework can be applied to a wide variety of input features and can be used for different purposes. Firstly, we test our system on a publicly available database, which consists of 2D images and we show that the cosine functions can be used to synthesize rotated versions from an object from which we see only a 2D image at a specific angle. Further, we perform 3D head pose estimation experiments using other two types of features: automatic landmarks and histogram-based 3D descriptors. We evaluate our approach on two publicly available databases, and demonstrate that angle estimations can be performed by optimizing the combination of these cosine functions to achieve state-of-the-art performance.
|
Spreading vectors for similarity search
Participants : Alexandre Sablayrolles, Matthijs Douze, Cordelia Schmid, Hervé Jégou.
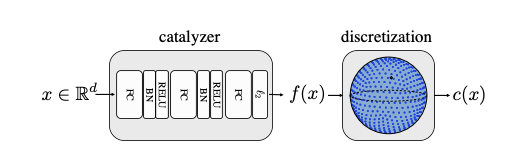
Discretizing multi-dimensional data distributions is a fundamental step of modern indexing methods. State-of-the-art techniques learn parameters of quantizers on training data for optimal performance, thus adapting quantizers to the data. In this work [29], we propose to reverse this paradigm and adapt the data to the quantizer: we train a neural net which last layer forms a fixed parameter-free quantizer, such as pre-defined points of a hyper-sphere. As a proxy objective, we design and train a neural network that favors uniformity in the spherical latent space, while preserving the neighborhood structure after the mapping. We propose a new regularizer derived from the Kozachenko–Leonenko differential entropy estimator to enforce uniformity and combine it with a locality-aware triplet loss. Experiments show that our end-to-end approach outperforms most learned quantization methods, and is competitive with the state of the art on widely adopted benchmarks. Furthermore, we show that training without the quantization step results in almost no difference in accuracy, but yields a generic catalyzer 3 that can be applied with any subsequent quantizer. The code is available online.
|
Diversity with Cooperation: Ensemble Methods for Few-Shot Classification
Participants : Nikita Dvornik, Cordelia Schmid, Julien Mairal.
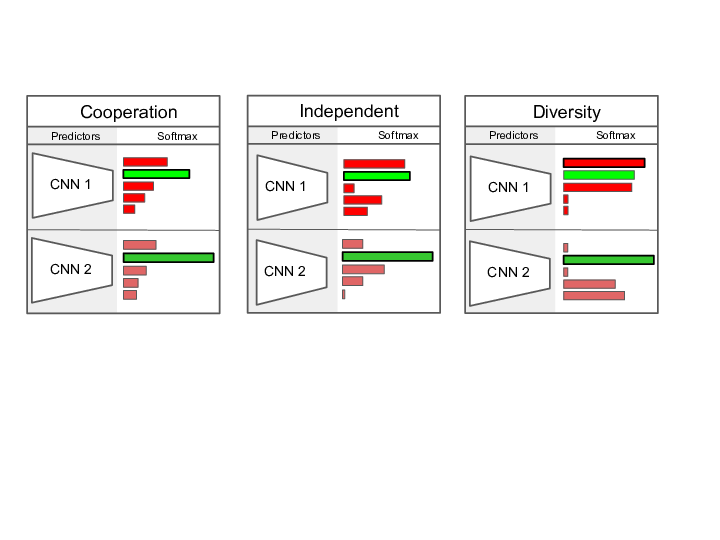
Few-shot classification consists of learning a predictive model that is able to effectively adapt to a new class, given only a few annotated samples. To solve this challenging problem, meta-learning has become a popular paradigm that advocates the ability to “learn to adapt". Recent works have shown, however, that simple learning strategies without meta-learning could be competitive. In our ICCV'19 paper [17], we go a step further and show that by addressing the fundamental high-variance issue of few-shot learning classifiers, it is possible to significantly outperform current meta-learning techniques. Our approach consists of designing an ensemble of deep networks to leverage the variance of the classifiers, and introducing new strategies to encourage the networks to cooperate, while encouraging prediction diversity, as illustrated in Figure 4. Evaluation is conducted on the mini-ImageNet and CUB datasets, where we show that even a single network obtained by distillation yields state-of-the-art results.
|
Unsupervised Pre-Training of Image Features on Non-Curated Data
Participants : Mathilde Caron, Piotr Bojanowski [Facebook AI] , Julien Mairal, Armand Joulin [Facebook AI] .
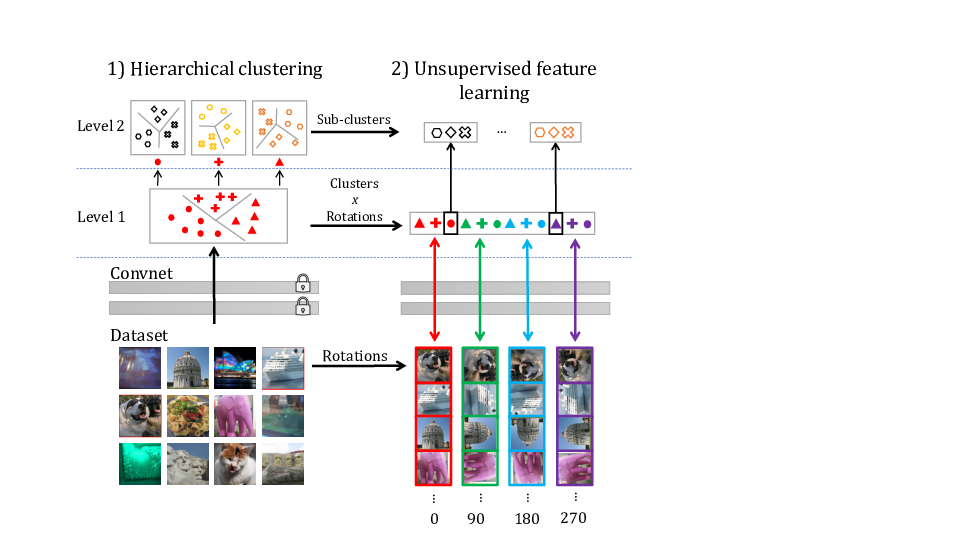
Pre-training general-purpose visual features with convolutional neural networks without relying on annotations is a challenging and important task. Most recent efforts in unsupervised feature learning have focused on either small or highly curated datasets like ImageNet, whereas using non-curated raw datasets was found to decrease the feature quality when evaluated on a transfer task. Our goal is to bridge the performance gap between unsupervised methods trained on curated data, which are costly to obtain, and massive raw datasets that are easily available. To that effect, we propose a new unsupervised approach, DeeperCluster [13], described in Figure 5 which leverages self-supervision and clustering to capture complementary statistics from large-scale data. We validate our approach on 96 million images from YFCC100M, achieving state-of-the-art results among unsupervised methods on standard benchmarks, which confirms the potential of unsupervised learning when only non-curated raw data are available. We also show that pre-training a supervised VGG-16 with our method achieves top-1 classification accuracy on the validation set of ImageNet, which is an improvement of over the same network trained from scratch.
|
Learning to Augment Synthetic Images for Sim2Real Policy Transfer
Participants : Alexander Pashevich, Robin Strudel [Inria WILLOW] , Igor Kalevatykh [Inria WILLOW] , Ivan Laptev [Inria WILLOW] , Cordelia Schmid.
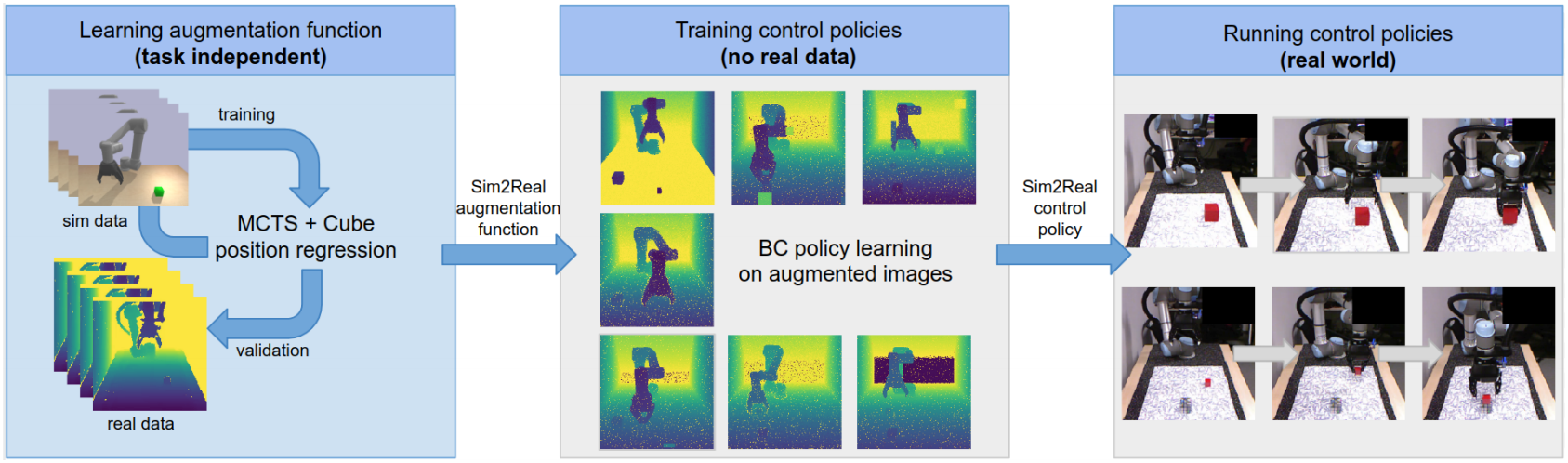
Vision and learning have made significant progress that could improve robotics policies for complex tasks and environments. Learning deep neural networks for image understanding, however, requires large amounts of domain-specific visual data. While collecting such data from real robots is possible, such an approach limits the scalability as learning policies typically requires thousands of trials. In this work [25] we attempt to learn manipulation policies in simulated environments. Simulators enable scalability and provide access to the underlying world state during training. Policies learned in simulators, however, do not transfer well to real scenes given the domain gap between real and synthetic data. We follow recent work on domain randomization and augment synthetic images with sequences of random transformations. Our main contribution is to optimize the augmentation strategy for sim2real transfer and to enable domain-independent policy learning, as illustrated in Figure 6. We design an efficient search for depth image augmentations using object localization as a proxy task. Given the resulting sequence of random transformations, we use it to augment synthetic depth images during policy learning. Our augmentation strategy is policy-independent and enables policy learning with no real images. We demonstrate our approach to significantly improve accuracy on three manipulation tasks evaluated on a real robot.
|
Learning to combine primitive skills: A step towards versatile robotic manipulation
Participants : Robin Strudel [Inria WILLOW] , Alexander Pashevich, Igor Kalevatykh [Inria WILLOW] , Ivan Laptev [Inria WILLOW] , Josef Sivic [Inria WILLOW] , Cordelia Schmid.
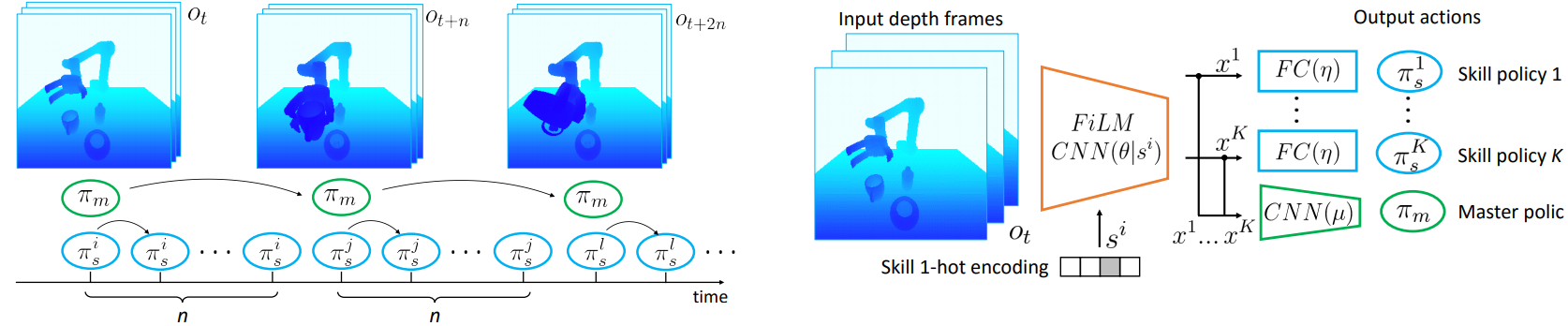
Manipulation tasks such as preparing a meal or assembling furniture remain highly challenging for robotics and vision. Traditional task and motion planning (TAMP) methods can solve complex tasks but require full state observability and are not adapted to dynamic scene changes. Recent learning methods can operate directly on visual inputs but typically require many demonstrations and/or task-specific reward engineering. In this work [40] we aim to overcome previous limitations and propose a reinforcement learning (RL) approach to task planning that learns to combine primitive skills illustrated in Figure 7. First, compared to previous learning methods, our approach requires neither intermediate rewards nor complete task demonstrations during training. Second, we demonstrate the versatility of our vision-based task planning in challenging settings with temporary occlusions and dynamic scene changes. Third, we propose an efficient training of basic skills from few synthetic demonstrations by exploring recent CNN architectures and data augmentation. Notably, while all of our policies are learned on visual inputs in simulated environments, we demonstrate the successful transfer and high success rates when applying such policies to manipulation tasks on a real UR5 robotic arm.
|
Probabilistic Reconstruction Networks for 3D Shape Inference from a Single Image
Participants : Roman Klokov, Jakob Verbeek, Edmond Boyer [Inria Morpheo] .
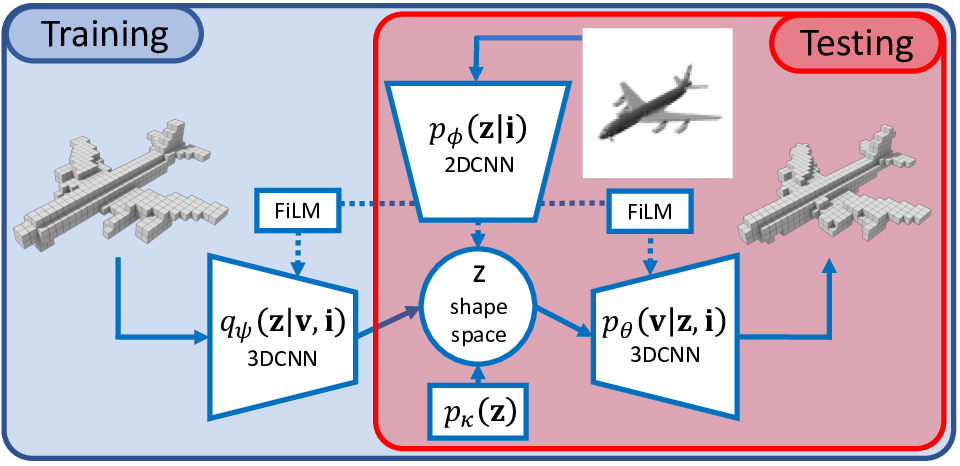
In our BMVC'19 paper [21], we study end-to-end learning strategies for 3D shape inference from images, in particular from a single image. Several approaches in this direction have been investigated that explore different shape representations and suitable learning architectures. We focus instead on the underlying probabilistic mechanisms involved and contribute a more principled probabilistic inference-based reconstruction framework, which we coin Probabilistic Reconstruction Networks. This framework expresses image conditioned 3D shape inference through a family of latent variable models, and naturally decouples the choice of shape representations from the inference itself. Moreover, it suggests different options for the image conditioning and allows training in two regimes, using either Monte Carlo or variational approximation of the marginal likelihood. Using our Probabilistic Reconstruction Networks we obtain single image 3D reconstruction results that set a new state of the art on the ShapeNet dataset in terms of the intersection over union and earth mover's distance evaluation metrics. Interestingly, we obtain these results using a basic voxel grid representation, improving over recent work based on finer point cloud or mesh based representations. In Figure 8 we show a schematic overview of our model.
|
Hierarchical Scene Coordinate Classification and Regression for Visual Localization
Participants : Xiaotian Li [Aalto Univ., Finland] , Shuzhe Wang [Aalto Univ., Finland] , Li Zhao [Aalto Univ., Finland] , Jakob Verbeek, Juho Kannala [Aalto Univ., Finland] .
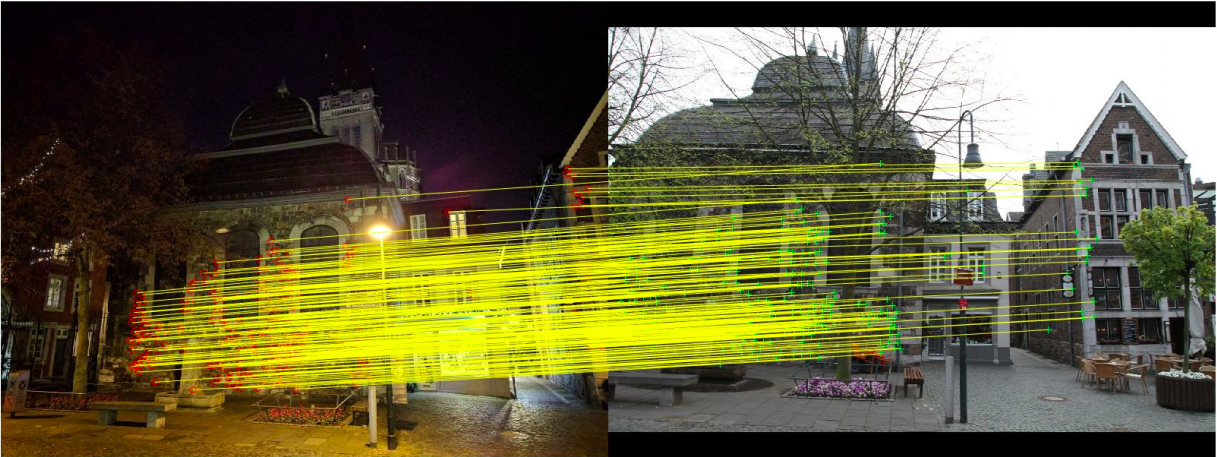
Visual localization is critical to many applications in computer vision and robotics. To address single-image RGB localization, state-of-the-art feature-based methods match local descriptors between a query image and a pre-built 3D model. Recently, deep neural networks have been exploited to regress the mapping between raw pixels and 3D coordinates in the scene, and thus the matching is implicitly performed by the forward pass through the network. However, in a large and ambiguous environment, learning such a regression task directly can be difficult for a single network. In our paper [37], we present a new hierarchical scene coordinate network to predict pixel scene coordinates in a coarse-to-fine manner from a single RGB image. The network consists of a series of output layers with each of them conditioned on the previous ones. The final output layer predicts the 3D coordinates and the others produce progressively finer discrete location labels. The proposed method outperforms the baseline regression-only network and allows us to train single compact models which scale robustly to large environments. It sets a new state-of-the-art for single-image RGB localization performance on the 7-Scenes, 12-Scenes, Cambridge Landmarks datasets, and three combined scenes. Moreover, for large-scale outdoor localization on the Aachen Day-Night dataset, our approach is much more accurate than existing scene coordinate regression approaches, and reduces significantly the performance gap w.r.t. explicit feature matching approaches. In Figure 9 we illustrate the scene coordinate predictions for the Aachen dataset experiments.
|

Moulding Humans: Non-parametric 3D Human Shape Estimation from Single Images
Participants : Valentin Gabeur, Jean-Sébastien Franco [Inria Morpheo] , Xavier Martin, Cordelia Schmid, Gregory Rogez [NAVER LABS Europe] .
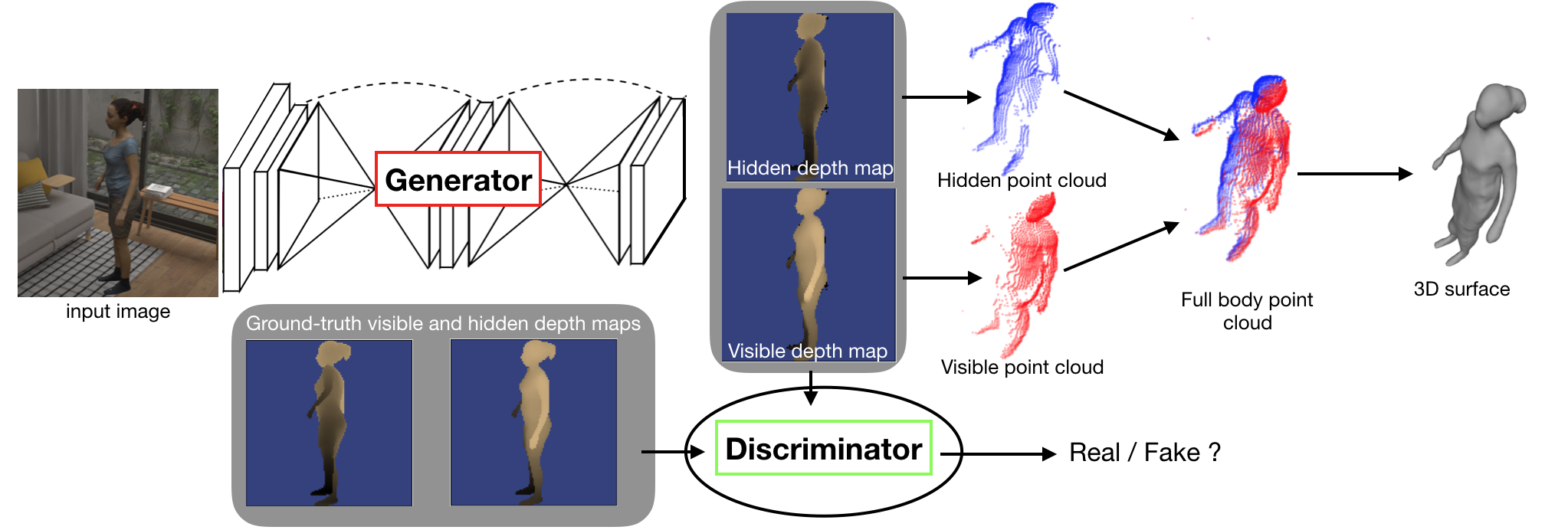
While the recent progress in convolutional neural networks has allowed impressive results for 3D human pose estimation, estimating the full 3D shape of a person is still an open issue. Model-based approaches can output precise meshes of naked under-cloth human bodies but fail to estimate details and un-modelled elements such as hair or clothing. On the other hand, non-parametric volumetric approaches can potentially estimate complete shapes but, in practice, they are limited by the resolution of the output grid and cannot produce detailed estimates. In this paper [19], we propose a non-parametric approach that employs a double depth map 10 to represent the 3D shape of a person: a visible depth map and a “hidden” depth map are estimated and combined, to reconstruct the human 3D shape as done with a “mould”. This representation through 2D depth maps allows a higher resolution output with a much lower dimension than voxel-based volumetric representations.
|
Focused Attention for Action Recognition
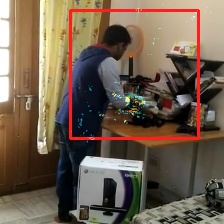
Participants : Vladyslav Sydorov, Karteek Alahari.
In this paper [30], we introduce an attention model for video action recognition that allows processing video in higher resolution, by focusing on the relevant regions first. The network-specific saliency is utilized to guide the cropping, we illustrate the procedure in Figure 11. We show performance improvement on the Charades dataset with this strategy.
|