

Section: Application Domains
Application Domains
An objective of the team is the application of the developed control and estimation algorithms for different scenarios in IoT or CPSs. The participation in various potential applications allows Valse team to better understand the features of CPSs and their required performances, and to formulate properly the control and estimation problems that have to be solved. Here is a list of ongoing and potential applications addressed in the team:
-
smart bivalve-based biosensor for water quality monitoring (ANR project WaQMoS, the developed sensor is shown in Fig. 2): in living beings, the presence of persistent external perturbations, may be difficult to measure, and important model uncertainties render the application of conventional techniques complicated; another issue for estimation is the consensus seeking between animals for a contamination detection [68];
Figure 2. The valvometer used in ANR project WaQMoS 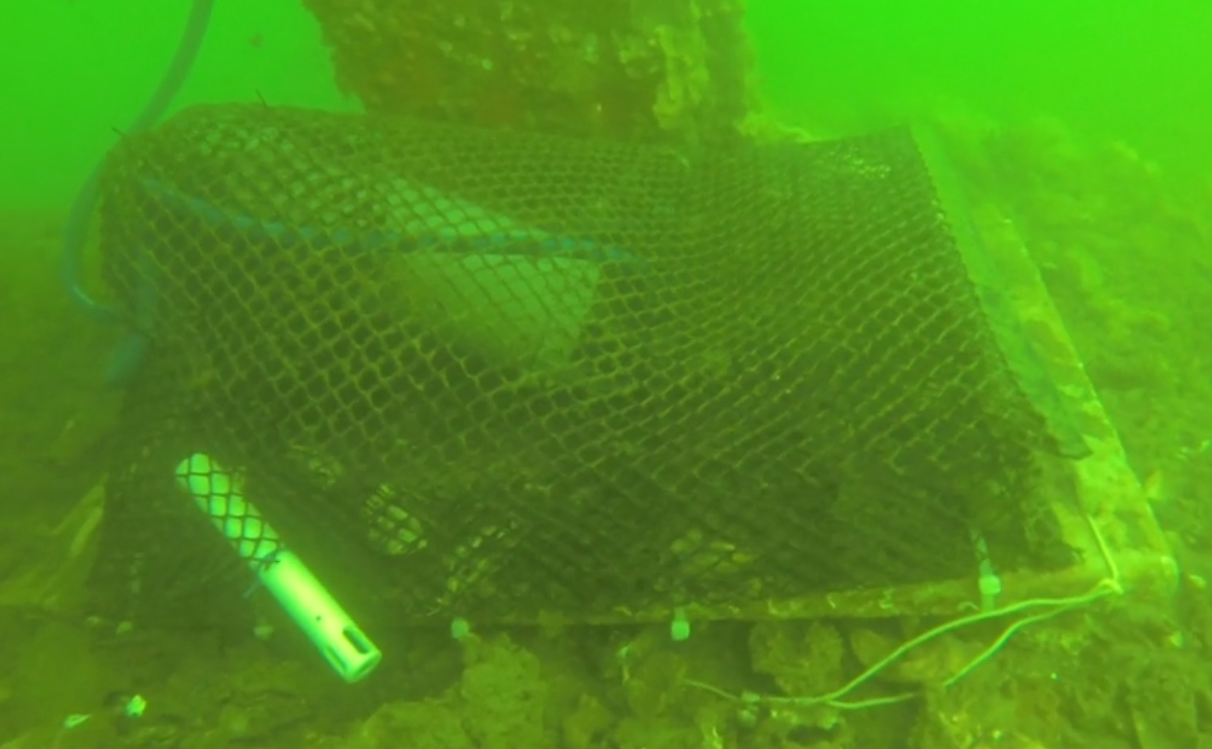
-
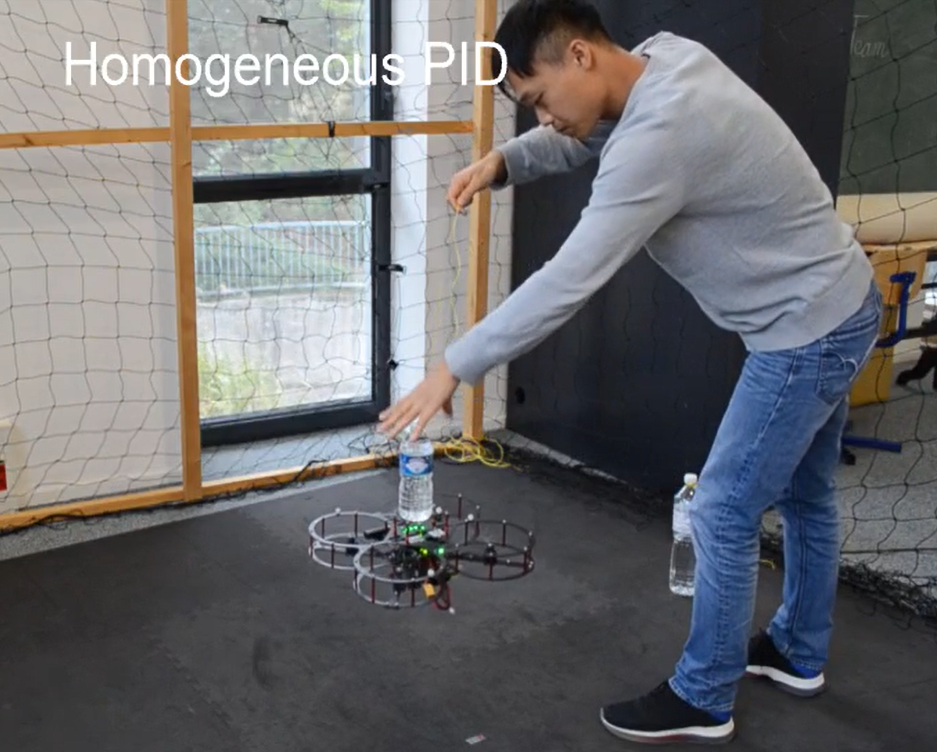
control and estimation for flying vehicles, e.g. quadrotors or blimps given in Fig. 3 (PhD Centrale Lille): nonlinearity of the model and its uncertainty coupled with important aerodynamic perturbations have to be compensated by fast (finite- or fixed-time) and robust control and estimation algorithms;
-
human behavior modeling and identification with posterior design of algorithms for human-computer interaction (ANR project TurboTouch): robust finite-time differentiators demonstrate good estimation capabilities needed for prediction in this application [88], [69];
-
human physiological characteristics estimation (like emotion detection, galvanic skin response filtering, fatigue evaluation in collaborations with Neotrope and Ellcie Healthy): intelligent robust filtering and finite-time distributed estimation are key features in these scenarios;
-
path planning for autonomous vehicles taking into account the behavior of humans (PhD CIFRE with SEQUEL team and Renault): application of interval and finite-time adaptive estimation and prediction techniques allows for treating the uncertainty of the environment by reducing computational complexity of reinforcement learning [79] (The examples of interval prediction algorithm application can be consulted here.);
-
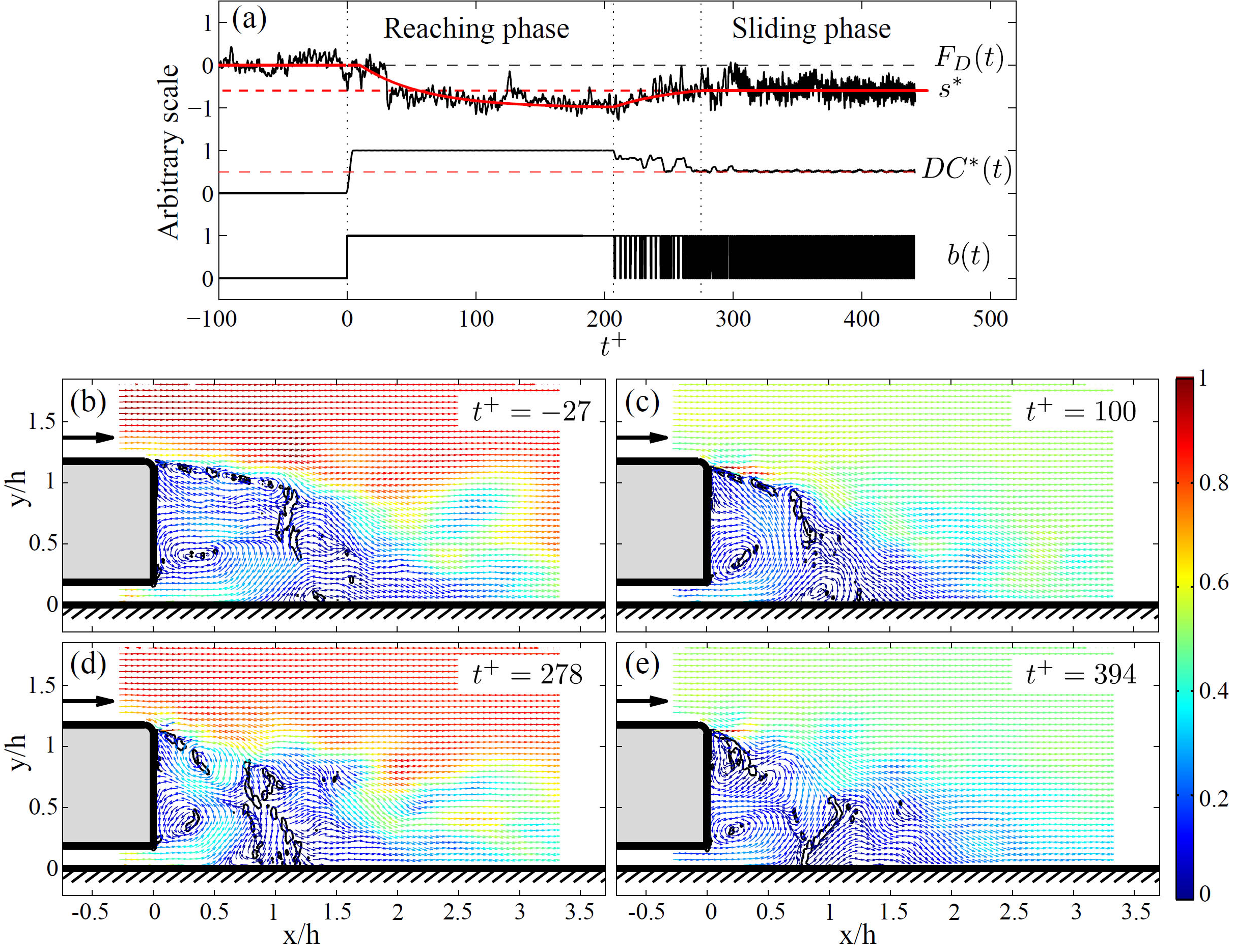
flow control (in the framework of ContrATech subprogram of CPER ELSAT, see also [78]): the case of control and estimation of a distributed-parameter system with very fast and uncertain dynamics, where finite-time solutions developed by Valse are necessary (an example of results is given in Fig. 4);
-
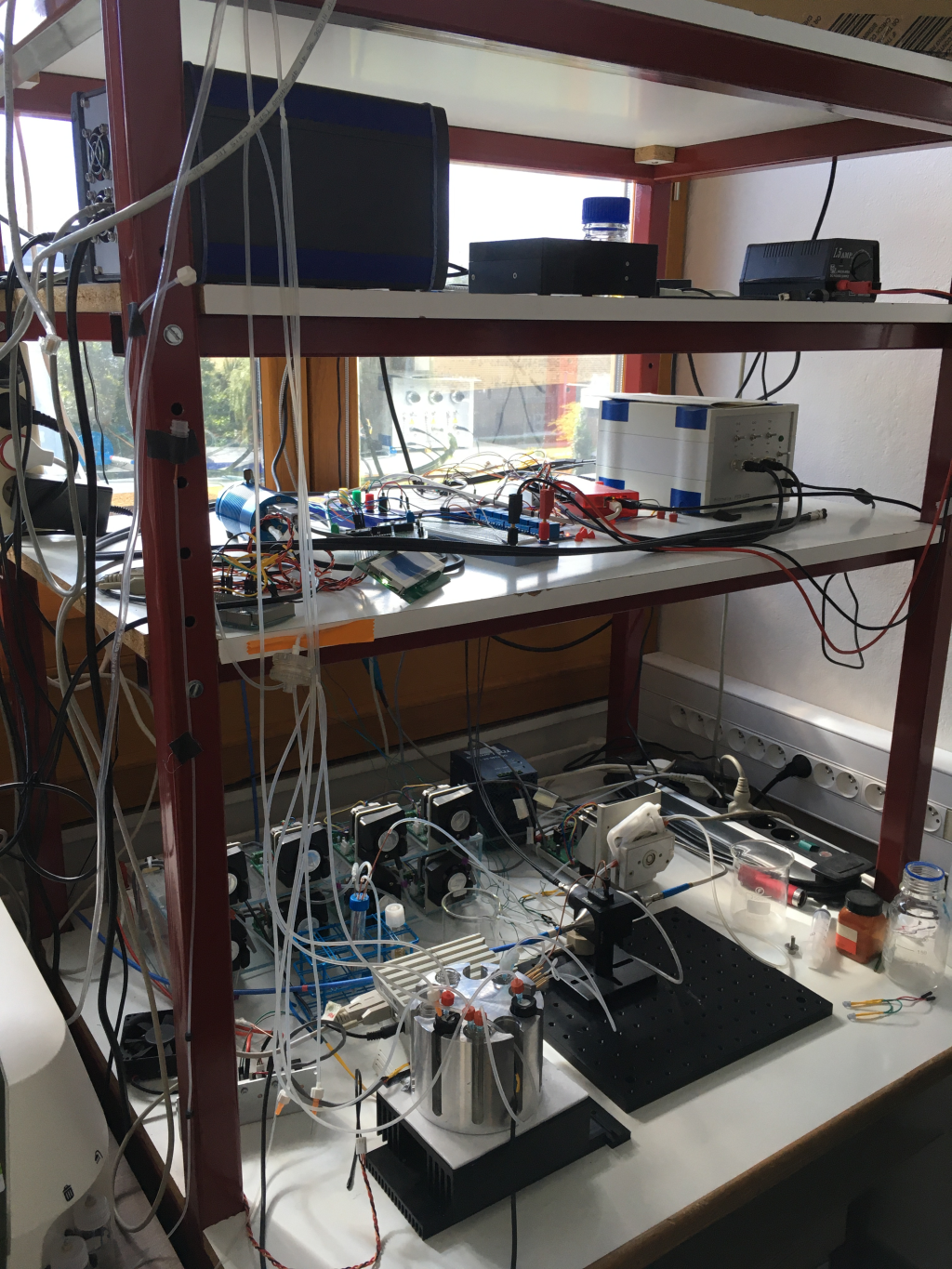
control of synthetic microbial communities (in the framework of IPL COSY, the experimental platform is shown in Fig. 5): here again, the problem is an important uncertainty of the model, which can be handled by robust sliding mode control algorithms, or by applying adaptive finite-time estimation and identification tools;

It is worth to highlight a widespread distribution of various scientific domains in the list of applications for the team given above. Such an interdisciplinarity for Valse is unsurprising, since the control theory is a science of systems whose interest today is, by nature, to interface with other disciplines and their fields of application. This is also well aligned with the domain of CPSs, which by its origin requires multidisciplinary competences.