

Section: Research Program
Research Program
Valse team works in the domains of control science: dynamical systems, stability analysis, estimation and automatic control. Our developments are focused on the theoretical and applied aspects related to control and estimation of large-scale multi-sensor and multi-actuator systems based on the use of the theories of finite-time/fixed-time/hyperexponential convergence and homogeneous systems. The Lyapunov function method and other methods of analysis of dynamical systems form a basis for the studies in Valse team.
The key idea of research program for the team is that a fast (non-asymptotic) convergence of the regulation and estimation errors increases the reliability of intelligent distributed actuators and sensors in complex scenarios, such as interconnected cyber-physical systems (CPSs).
The expertise of Valse's members in theoretical developments of control and estimation theory (finite-time control and estimation algorithms in centralized context [84], [70], [81], [80], [77], homogeneity framework for differential equations [85], [72], [71], [73], [75], [86], [82], time-delay systems [74], [76], [89], distributed systems [83] and algebraic-based methods for estimation [87], [88]) is an essential ingredient to achieve our objective.
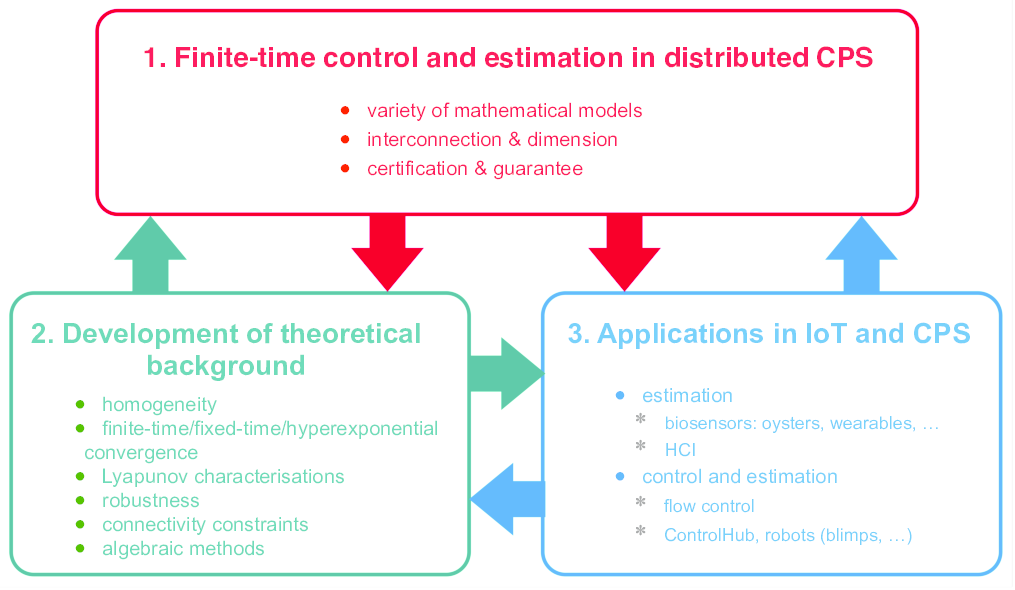
The generic chart of different goals and tasks included in the scientific work program of Valse, and interrelations between them, are presented in Fig. 1. We have selected three main objectives to pursuit with the related tasks to fulfill:
-
The first objective consists in design of control and estimation solutions for CPS and IoT, which is the principal aim of Valse, it will contain the main outcomes of our research.
-
The second objective is more theoretical, which is needed to make the basement for our design and analysis parts in the previous goal.
-
The third objective deals with applications, which will drive the team and motivate the theoretical studies and selected design performances.
All these objectives are interconnected: from a particular problem in an IoT application, it is planned to design a control or estimation algorithm, which leads to development of theoretical tools; and vice versa, a new theoretical advance can provide a possibility for development of novel tools, which can be used in applications.
To explain our motivation: why to use finite-time? Applying any method for control/estimation has a price in terms of its advantages and disadvantages. There is no universal framework that is the best always and everywhere. Finite-time may appear as a luxurious property for a physical system, requiring the use of nonlinear tools. Of course, if an asymptotic convergence and a linear model are enough for solving a given problem, then there is no reason to develop something else. However, most of the present problems in CPS and IoT are nonlinear (i.e. they have various local behaviors that cannot be collected in only one linear model). Design and analysis of various local linearized models and solutions are luxurious, too. The theory of homogeneity can go beyond linearity offering many new features, while not appearing as severe as other nonlinear tools and having almost all hints of the linear framework. Suppose that, thanks to the homogeneity theory, finite-time/fixed-time can be obtained with a limited difficulty, while adding the bonuses of a stronger robustness and a faster convergence compared to the linear case? We are convinced that the price of going beyond linear control and estimation can be strongly dropped down by maturing the theory of homogeneity and finite/fixed-time convergence. And also, convinced that it will be compensated in terms of robustness and speed, which can be demanded in the new areas of application as IoT, for example.