

Section: New Results
Modelling and Identification
Multi-Dimensional Wrist Musculoskeletal Modeling for Tremor Simulation
Participants : Peng Yao, Mitsuhiro Hayashibe, Dingguo Zhang (Shanghai Jiao Tong Univ.).
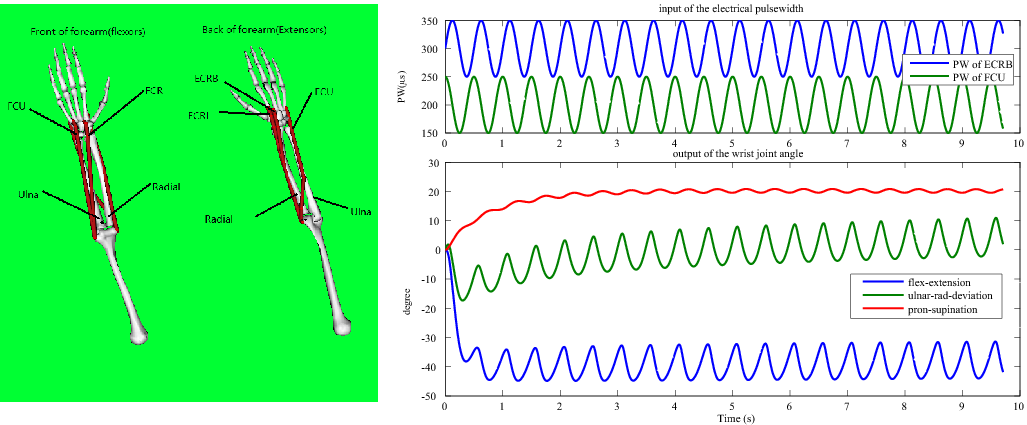
In this work, we established multi-dimensional wrist musculoskeletal model to be used for suppressing the wrist joint's tremor by functional electrical stimulation. Often the wrist model for FES control is based on 1DOF biomechanical model for the simplicity and convenience to develop the controller. However, wrist motion is generated by complex interactions of multiple muscles spanning the wrist joint. Here, we have tried to have 3DOF wrist model considering main musles involved in flex-extension, radial-ulnar deviation, and pron-supination as in the left of Fig. 1 (opensim model). Inertia of 3DOF joint model was obtained based on the work of de Leva which modified Zatsiorsky parameters. Joint dynamics was formed by inertia, gravitational torque, and passive visco-elastisity. As for the mapping between torque and muscles, the moment arm matrix was obtained from opensim software, thus anatomical information could be considered along with muscle parameters such as muscle-length, isometric maximal forces. For this first trial, 4 muscles were considered based on Hill-type model. In order to confirm the generated motion by muscle activation, we activated the ECRB (extensor carpi radialis brevis) and FCU (flexor carpi ulnaris) in antiphase, the corresponding 3DOF wrist angles were obtained as in Fig. 1 . Qualitatively, we know that ECRB can generate negative flexion angle, negative deviation angle and positive pronation when it is activated; while FCU can produce positive flexion angle, positive deviation angle and positive pronation angle. When both ECRB and FCU are activated in order, the reasonable wrist angles could be generated. We will work on the development of tremor controller in the future work.
|
Multi-functional EMG classification for dynamic EMG-motion modeling
Participants : Lizhi Pan, Mitsuhiro Hayashibe, Dingguo Zhang, Xiangyang Zhu (Shanghai Jiao Tong Univ.).
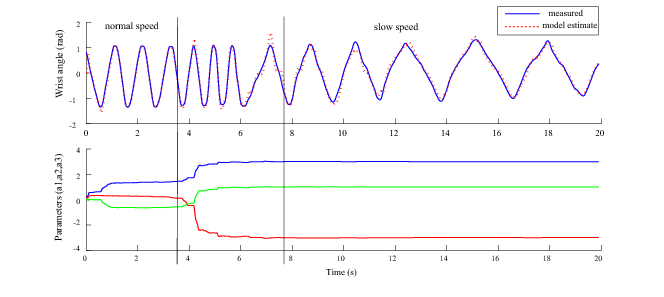
EMG signal is widely used to control a limb protheses such as exoskeleton. It would be also useful to control prosthetic hand for upper-extremity amputees. Especially for upper limb control, hybrid control both for position and torque is required for dynamic motions. In this work, we aimed at establishing the EMG-joint angle model for dynamic motions, to effectively decode EMG signals to reproduce the corresponding motion in different velocity. In the experiment, the subject performed the wrist flextion-extension with different speeds along with EMG measurements on flexor and extensor muscles. ARX model, of which the parameters are adaptively identified by extended kalman filter, was applied to represent 1 DoF (degree of freedom) EMG-joint angle model. The result shows that the EMG-angle model could produce good angle tracking as shown in Fig. 2 . We have observed that three principal parameters a1, a2, a3 for autoregressive term are almost constant at the same angular speed and different angular speeds correspond to different model parameters. With this regular pattern, SR (Switch Rregime) model would be possible to be used to switch the model to reproduce the motion in different conditions. In the further work, we work on creating a SR EMG-angle model using learning and classification technique to dynamicaly decode the EMG signals into the corresponding motions only based on EMG without angle information.
|
Real-time Volumetric Skeletal Muscle Deformation
Participants : Yacine Berranen, Mitsuhiro Hayashibe, Benjamin Gilles.
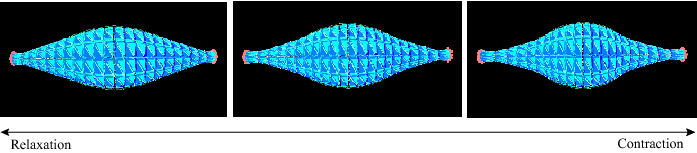
In this work, we explore skeletal muscle volumetric deformation. The current available simulation for musculoskeletal model is basically using wire-type muscle model which considers only principal longitudinal path of the muscle-tendon units. If we aim at the simulation of the interaction between muscles and objects like orthesis, exoskeleton keeping classical biomechanical property, wire-type modeling is not sufficient. In addition, muscle modeling in volumetric way gives another advantage to reflect microscopic muscle fiber direction and function. We have tried to implemente real-time volumetric skeletal muscle deformation as in Fig. 3 using the INRIA SOFA environment. The idea is making more realistic musculoskeletal simulation from the current approximation of muscle model as wire element to physically and functionally detailed simulation as volumetric element.
|
Muscle Strength and Mass Distribution Identification in Musculoskeletal Modeling
Participants : Mitsuhiro Hayashibe, Gentiane Venture (Tokyo Univ. of Agriculture and Technology), Ko Ayusawa (Univ. of Tokyo), Yoshihiko Nakamura (Univ. of Tokyo).
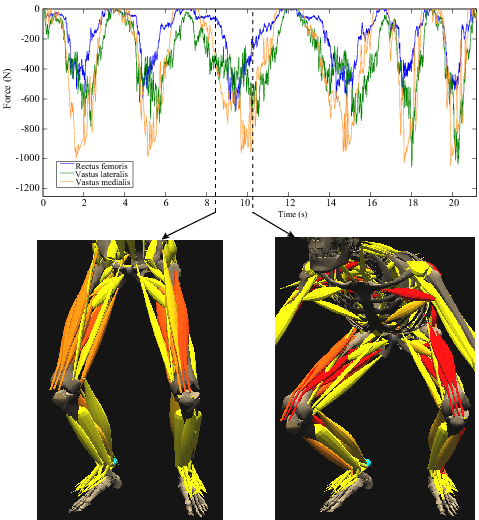
In current biomechanics approach, the assumptions are commonly used in body-segment parameters and muscle strength parameters due to the difficulty in accessing those subject-specific values. Especially in the rehabilitation and sports science where each subject can easily have quite different anthropometry and muscle condition due to disease, age or training history, it would be important to identify those parameters to take benefits correctly from the recent advances in computational musculoskeletal modeling. In this paper, Mass Distribution Identification to improve the joint torque estimation and Muscle Strength Identification to improve the muscle force estimation were performed combined with previously proposed methods in muscle tension optimization. This first result highlights that the reliable muscle force estimation could be extracted after these identifications. Fig. 4 shows the estimated muscle forces of Rectus Femoris, Vastus Lateralis and Vastus Medialis with different speeds (first two series are normal speed, second two are slow and last two are fast). The corresponding visualizations of estimated muscle tensions at the indicated time instant are depicted in the bottom. The proposed framework toward subject-specific musculoskeletal modeling would contribute to a patient-oriented computational rehabilitation [22] .
|
Joint Angle Estimation with Inertial Sensors Calibrated by Kinect
Participants : Mitsuhiro Hayashibe, Antonio Padilha Lanari Bo (Univ. of Brasilia), Philippe Poignet.
In this work, we explore the combined use of inertial sensors and the Kinect for applications on rehabilitation robotics and assistive devices. In view of the deficiencies of each individual system, a new method based on Kalman Filtering was developed in order to perform online calibration of sensor errors automatically whenever measurements from Kinect are available. The method was evaluated on experi- ments involving healthy subjects performing multiple DOF tasks. Accelerometers and gyrometers are used to estimate joint angle, while the Kinect is used for initializing the inertial system and for enabling 3D visualization of the performed task as in Fig. 5 [32] .

Investigation of fibre size stimulation selectivity using earthworm model
Participants : Pawel Maciejasz, Christine Azevedo Coste, David Andreu, David Guiraud.
Fibre type and diameter selective stimulation may allow to restore various motor and sensory functions of human body that have been lost due to disease or injury. For example in people unable to voluntary empty the bladder, selective stimulation of small fibres within the ventral branch of the sacral nerve roots (S2-S4/5) would induce detrusor contraction and those cause bladder empting closest to normal physiology. Currently, it is not possible to perform it in such a way, because stimulation of sacral nerve roots activates also bigger fibres innervating the urethral sphincter, which closest the outlet of the bladder.
Already many stimulation techniques have been proposed for fibre type and diameter selective stimulation. They were verified performing computer simulations and in some cases also by in vivo experiments on mammalian models. However, results of computer simulations still need to be confirmed by in vivo experiments, whereas experiments on mammalian models, due to high number of fibres within stimulated nerve, can be very complex to perform and obtained results difficult to interpret. As a result, it is still unclear which stimulation parameters may allow for selective stimulation of only particular group of fibers.
Therefore we propose the earthworm (Lumbricus terrestris) as a model for selective stimulation. The earthworm has three giant nerve fibres, with two distinctly different conduction velocities and diameters. Therefore it is very easy to distinguish between fibres that are firing at the moment. As a consequence the selectivity of stimulation may be immediately verified without application of sophisticated signal processing and averaging techniques.
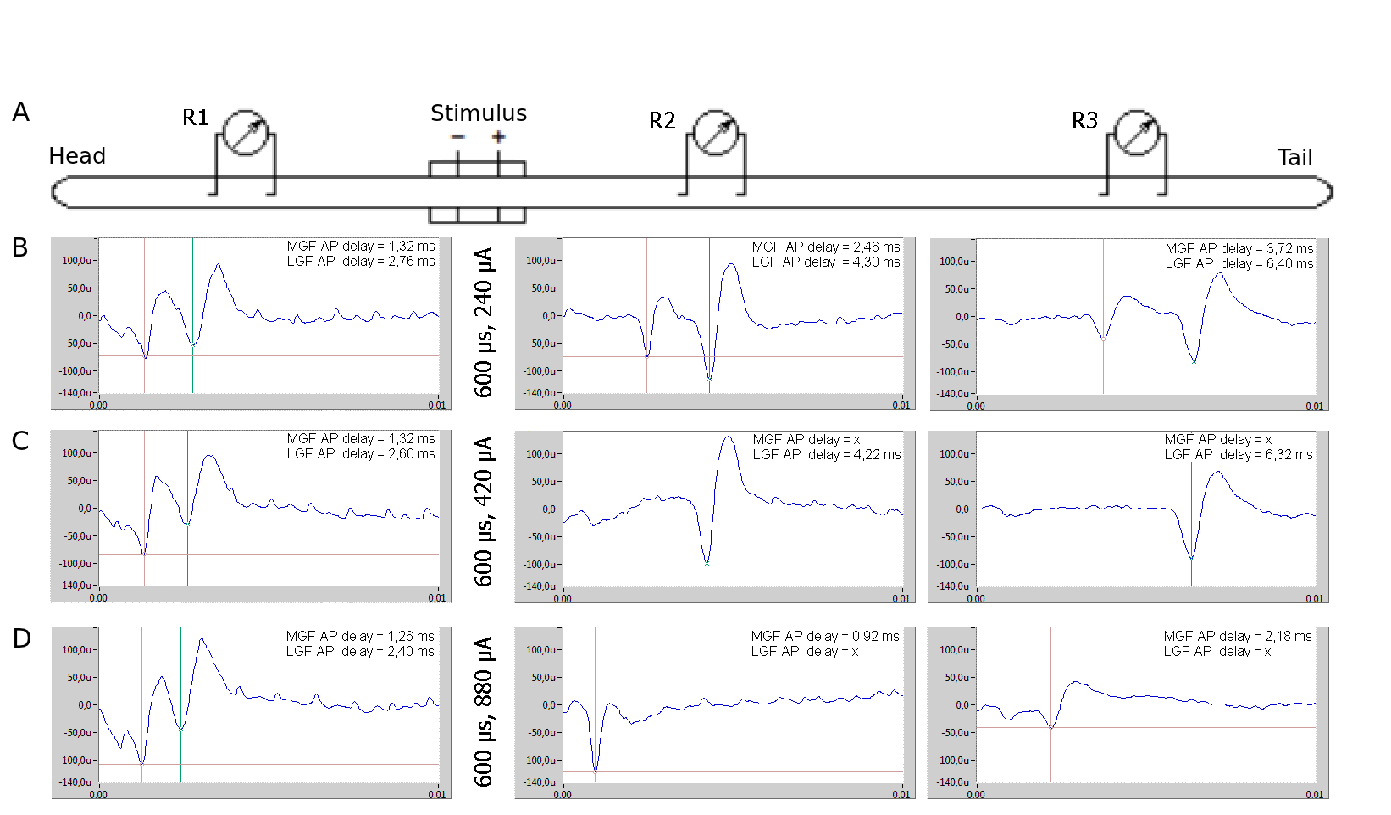
We have investigated influence of various pulse amplitudes and durations on the selectivity of stimulation. Using a simple experimental set-up [29] shown in the fig.6 A, we were able to achieve selective activation of small (fig. 6 C) and big (fig. 6 D) fibers, as well as concurrent activation of both fibers (fig. 6 B) [28] . For that purpose we have used so called "anodal block" technique.
Based on the results of the above experiments, the recommendations of the optimal parameters for selective stimulation of nerve fibres will be prepared. Afterwards we are going to verified these recommendations in mammalian models (rats).
|
Neural network based identification for time-variant dynamics
Participants : Zhan Li, Mitsuhiro Hayashibe, David Guiraud.
Due to high nonlinearity and time variance in muscle dynamics under FES, the identification of muscle model is complex task. The time-variance of muscle response may come from muscle fatigue, but also the electrode attachment condition. Along with such long-term time-variance, short term time-variance may be created by reflex effect. In addition, the characteristics of such variance even may change in time in an unpredicted way. Reinforcement learning framework may be applied to bring the robustness in adaptive identification. Current work is focused on the usage of discrete-time recurrent neural network for model identification.