

Section: Scientific Foundations
Biomechanics and Motion Control
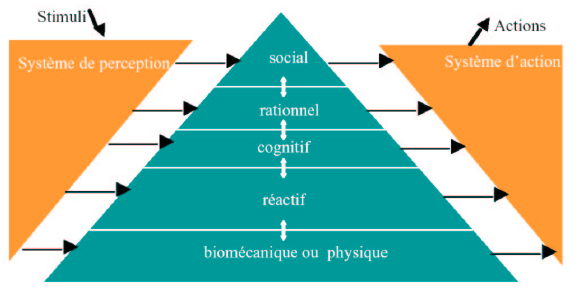
Human motion control is a very complex phenomenon that involves several layered systems, as shown in figure 3 . Each layer of this controller is responsible for dealing with perceptual stimuli in order to decide the actions that should be applied to the human body and his environment. Due to the intrinsic complexity of the information (internal representation of the body and mental state, external representation of the environment) used to perform this task, it is almost impossible to model all the possible states of the system. Even for simple problems, there generally exist infinity of solutions. For example, from the biomechanical point of view, there are much more actuators (i.e. muscles) than degrees of freedom leading to infinity of muscle activation patterns for a unique joint rotation. From the reactive point of view there exist infinity of paths to avoid a given obstacle in navigation tasks. At each layer, the key problem is to understand how people select one solution among these infinite state spaces. Several scientific domains have addressed this problem with specific points of view, such as physiology, biomechanics, neurosciences and psychology.
In biomechanics and physiology, researchers have proposed hypotheses based on accurate joint modeling (to identify the real anatomical rotational axes), energy minimization, force and torques minimization, comfort maximization (i.e. avoiding joint limits), and physiological limitations in muscle force production. All these constraints have been used in optimal controllers to simulate natural motions. The main problem is thus to define how these constraints are composed altogether such as searching the weights used to linearly combine these criteria in order to generate a natural motion. Musculoskeletal models are stereotyped examples for which there exist infinity of muscle activation patterns, especially when dealing with antagonist muscles. An unresolved problem is to define how using the above criteria to retrieve the actual activation patterns while optimization approaches still lead to unrealistic ones. It is still an open problem that will require multidisciplinary skills including computer simulation, constraint solving, biomechanics, optimal control, physiology and neurosciences.
In neuroscience, researchers have proposed other theories, such as coordination patterns between joints driven by simplifications of the variables used to control the motion. The key idea is to assume that instead of controlling all the degrees of freedom, people control higher level variables which correspond to combination of joint angles. In walking, data reduction techniques such as Principal Component Analysis have shown that lower-limb joint angles are generally projected on a unique plan whose angle in the state space is associated with energy expenditure. Although there exists knowledge on specific motion, such as locomotion or grasping, this type of approach is still difficult to generalize. The key problem is that many variables are coupled and it is very difficult to objectivly study the behavior of a unique variable in various motor tasks. Computer simulation is a promising method to evaluate such type of assumptions as it enables to accurately control all the variables and to check if it leads to natural movements.
Neurosciences also address the problem of coupling perception and action by providing control laws based on visual cues (or any other senses), such as determining how the optical flow is used to control direction in navigation tasks, while dealing with collision avoidance or interception. Coupling of the control variables is enhanced in this case as the state of the body is enriched by the big amount of external information that the subject can use. Virtual environments inhabited with autonomous characters whose behavior is driven by motion control assumptions is a promising approach to solve this problem. For example, an interesting problem in this field is navigation in an environment inhabited with other people. Typically, avoiding static obstacles together with other people displacing into the environment is a combinatory problem that strongly relies on the coupling between perception and action.
One of the main objectives of MimeTIC is to enhanche knowledge on human motion control by developing innovative experiments based on computer simulation and immersive environments. To this end, designing experimental protocols is a key point and some of the researchers in MimeTIC have developed this skill in biomechanics and perception-action coupling. Associating these researchers to experts in virtual human simulation, computational geometry and constraints solving enable us to contribute to enhance fundamental knowleged in human motion control.