Section: New Results
Motion Sensing and analysis
Participants : Franck Multon [contact] , Richard Kulpa, Anthony Sorel, Edouard Auvinet.
Sensing human activity is a very active field of research, with a wide range of applications ranging from entertainment and serious games to personal ambient living assistance. MimeTIC aims at proposing original methods to process raw motion capture data in order to compute relevant information according to the application.
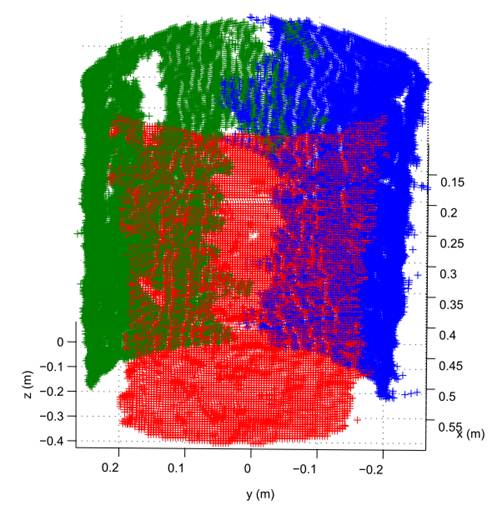
In personal ambient living monitoring, we have collaborated with University of Montreal, Department of Computer Science and Operations Research (DIRO) which main activity is biomedical engineering. A co-supervised student is addressing two complementary problems: detecting people falling in everyday environment and providing easy-to-use clinical gait analysis systems for early detection of potential risks of falling. In the last decade, gait analysis has become one of the most active research topics in biomedical research engineering partly due to recent developpement of sensors and signal processing devices and more recently depth cameras. The latters can provide real-time distance measurements of moving objects. In this context, we present a new way to reconstruct body volume in motion using multiple active cameras from the depth maps they provide. A first contribution of this paper is a new and simple external camera calibration method based on several plane intersections observed with a low-cost depth camera which is experimentally validated. A second contribution consists in a body volume reconstruction method based on visual hull that is adapted and enhanced with the use of depth information. Preliminary results based on simulations are presented and compared with classical visual hull reconstruction. These results show that as little as three low-cost depth cameras can recover a more accurate 3D body shape than twenty regular cameras (see figure 4 ).
|
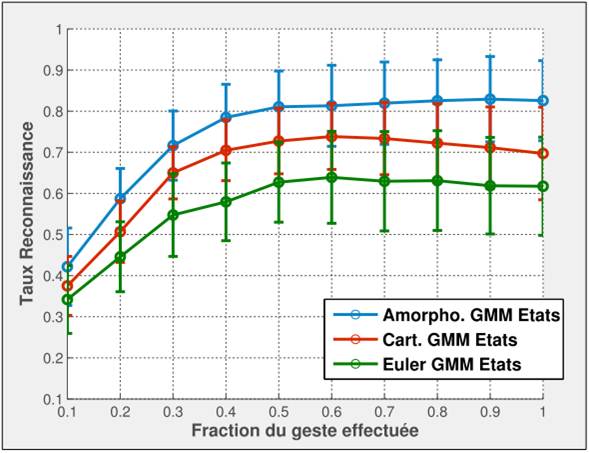
In entertainment and serious games, the problem is different as we need to accurately now the action performed by the user in order to react in a convenient manner. Collaboration with Artefacto Company enabled us to develop such motion recognition methods in serious games scenarios. Given motion capture data provided by an optical motion capture system lead to large state vectors in which the relevant information is hidden. Mixture of Gaussians is generally used as an input of Hidden Markov Models to recognize a motion according to this raw data. To simplify, features are generally introduced in order to capture the relevant geometrical property of the motion with either general information (such as joint angles or Cartesian positions) or application-specific information. The former type of information has the advantage to be generic but leads to recognizers that are very sensitive to style and morphology variations. Previously, we have proposed a new generic feature based on morphology-independent representation that enables to tackle this problem [28] . We now have explored the robustness of this type of features for early recognition, when using mixture of Gaussians instead of Hidden Markov Models. We have shown that a motion can be recognized when only 50% of the motion is performed. The recognition rate is especially high with this type of feature compared to classical Euler angles and Cartesian data, especially when a new user is performing the motion [6] .