Section: New Results
Motion Sensing and analysis
Participant : Franck Multon [contact] .
Sensing human activity is a very active field of research, with a wide range of applications ranging from entertainment and serious games to personal ambient living assistance, including rehabilitation. MimeTIC aims at proposing original methods to process raw motion capture data in order to compute relevant information according to the application.
In rehabilitation, we have collaborated with University of Montreal, Saint-Justine Hospital which main activity is rehabilitation of children with pathologies of the pyramidal control system. In this domain, defining metrics and relevant measurement to diagnose pathologies and to monitor patients during treatment is a key point. In gait, most of the previous works focus on gait spatio-temporal parameters (such as step length, frequency, stride duration, global speed) which could be measured with two main families of systems: 1) one-point measurement with a force plate, one accelerometer or dedicated devices (such as a Gait Ride), or 2) multi-point measurement systems with motion sensors or markers placed over the patient's skin. The former provides the clinician with compact but incomplete knowledge whereas the latter provides him with numerous data which are sometimes difficult to analyze and to get (specific technical skills are required). The first step to any type of analysis is to detect the main gait events, such as foot strikes and toe offs. In treadmill walking, widely used in rehabilitation as it enables the clinician to analyze numerous gait cycles in a limited place with a controlled speed, automatically detecting such gait events requires complex devices with specific technical skills (such as calibration and post-processing with motion capture systems).
Recent papers have demonstrated that low-cost and easy-to-use depth cameras (such as a Kinect from Microsoft) look promising for serious applications requiring motion capture. However there exist some confusion between the feet and the ground at foot strike and foot off leading to bad estimation of the gait cycle events. We have proposed an alternative approach that consists in using the strong correlation between knee and foot trajectories to deduce foot strikes thanks to knee movements. The extremes of the distance between the two knees along the longitudinal axis provides us with very accurate gait events detection compared to previous works.
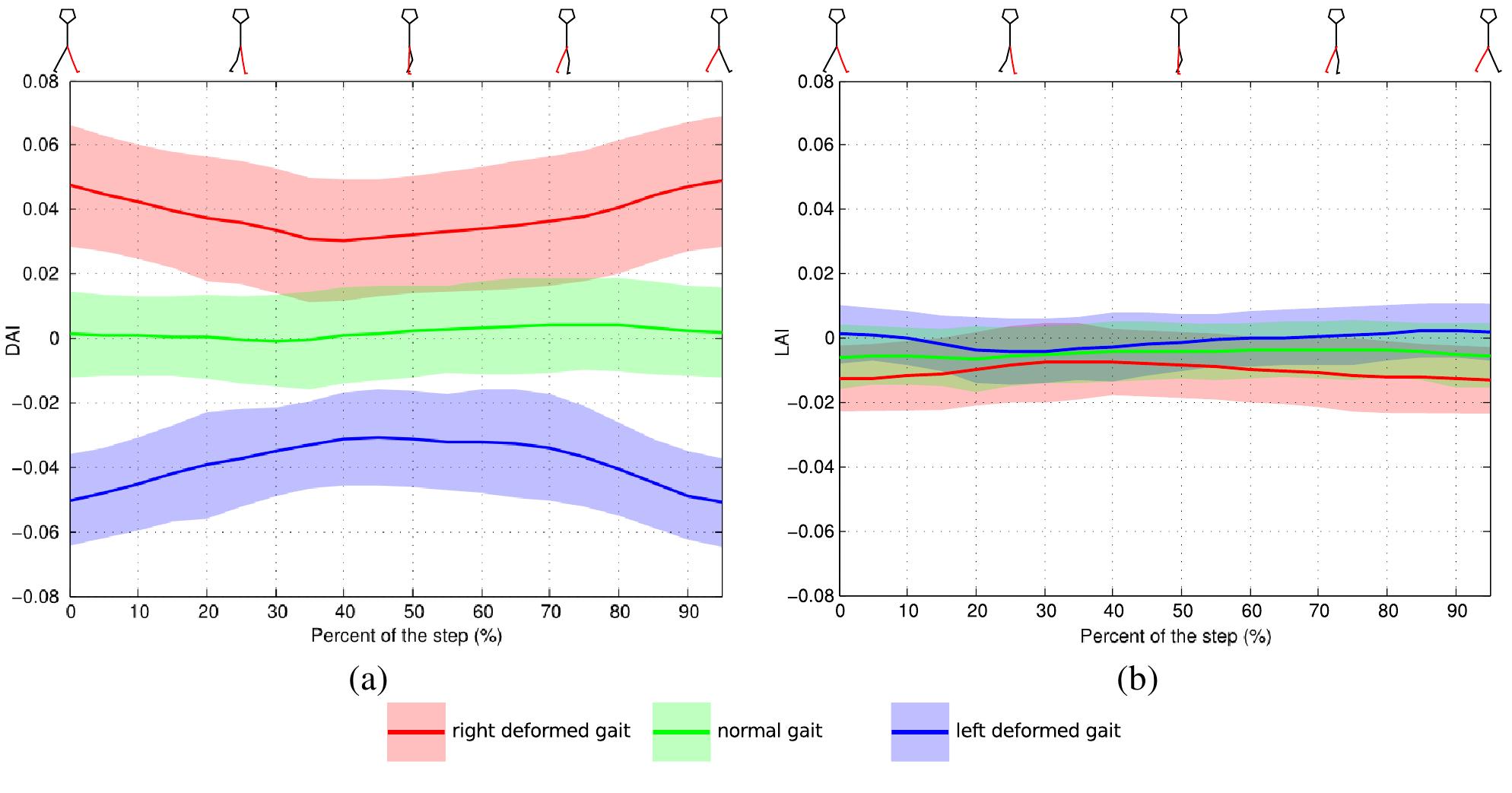
A second contribution consisted in defining a global gait asymmetry index according to depth images provided by a Kinect. In previous works this index relied on computing ratio between joint angles. With a Kinect, joint angles may be very noisy that could affect the asymmetry index. We have introduced a new index which is directly deduced from depth images without any joint angle estimation nor skeleton fitting. The method consists in building a model of the gait cycle of the patient by averaging depth images recorded along several cycles. As a consequence the noise within the instantaneous depth images is filtered leading to accurate surfaces of the patient gait (leading to a 3D+time data structure). The main vertical axis of the surface is used to define a symmetry plane. Consequently surfaces of the right part of the body can be symmetrized to be compared to the left part at compatible times in the gait cycle (such as a right foot strike is symmetrized to be compared to a left foot strike). The comparison between the two surfaces leads to a promising asymmetry index. The results (see Figure 4 ) demonstrate that this method is able to significantly distinguish asymmetrical gaits obtained by adding a 5cm sole under one of the feet of healthy subjects. Ongoing works consist in comparing this index to previously published ones which were based on accurate motion capture data. It will also be applied to unimpaired gaits of pathological subjects.
|