Section: New Results
Reconstruction
Noise-Adaptive Shape Reconstruction from Raw Point Sets
Participants : Simon Giraudot, Pierre Alliez.
In collaboration with David Cohen-Steiner (GEOMETRICA project-team)
We devised a noise-adaptive shape reconstruction method specialized to smooth, closed shapes [7] . Our algorithm takes as input a defect-laden point set with variable noise and outliers, and comprises three main steps. First, we compute a novel noise-adaptive distance function to the inferred shape, which relies on the assumption that the inferred shape is a smooth submanifold of known dimension. Second, we estimate the sign and confidence of the function at a set of seed points, through minimizing a quadratic energy expressed on the edges of a uniform random graph. Third, we compute a signed implicit function through a random walker approach with soft constraints chosen as the most confident seed points computed in the previous step.
Surface Reconstruction through Point Set Structuring
Participants : Florent Lafarge, Pierre Alliez.
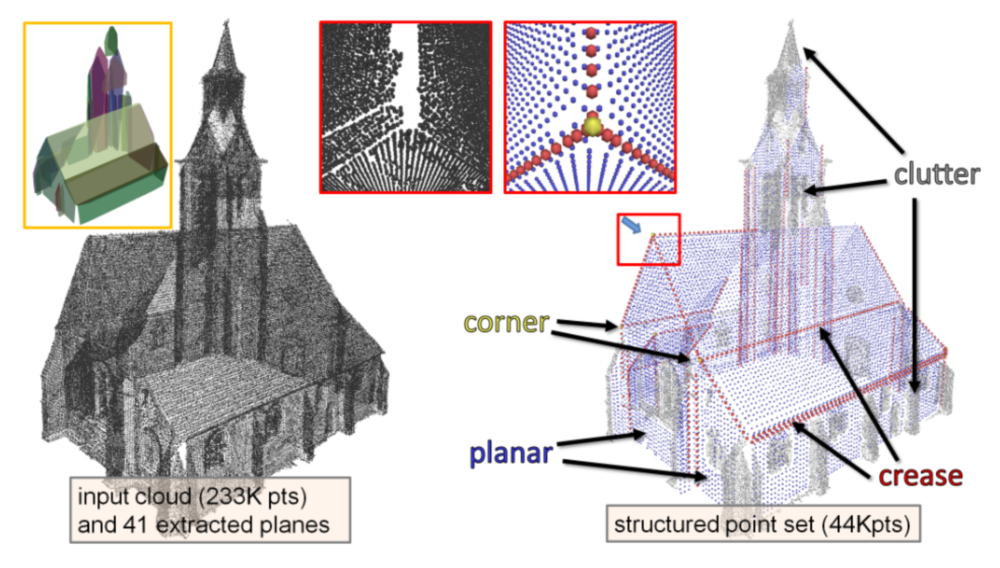
We present a method for reconstructing surfaces from point sets [8] . The main novelty lies in a structure-preserving approach where the input point set is first consolidated by structuring and resampling the planar components, before reconstructing the surface from both the consolidated components and the unstructured points. Structuring facilitates the surface reconstruction as the point set is substantially reduced and the points are enriched with structural meaning related to adjacency between primitives. Our approach departs from the common dichotomy between smooth/piecewise-smooth and primitive-based representations by gracefully combining canonical parts from detected primitives and free-form parts of the inferred shape (Figure 6 ).
Hybrid Multi-view Stereo for Modeling Urban Scenes
Participant : Florent Lafarge.
In collaboration with Renaud Keriven (Acute3D), Mathieu Bredif (IGN), and Hiep Vu (Ecole des Ponts ParisTech).
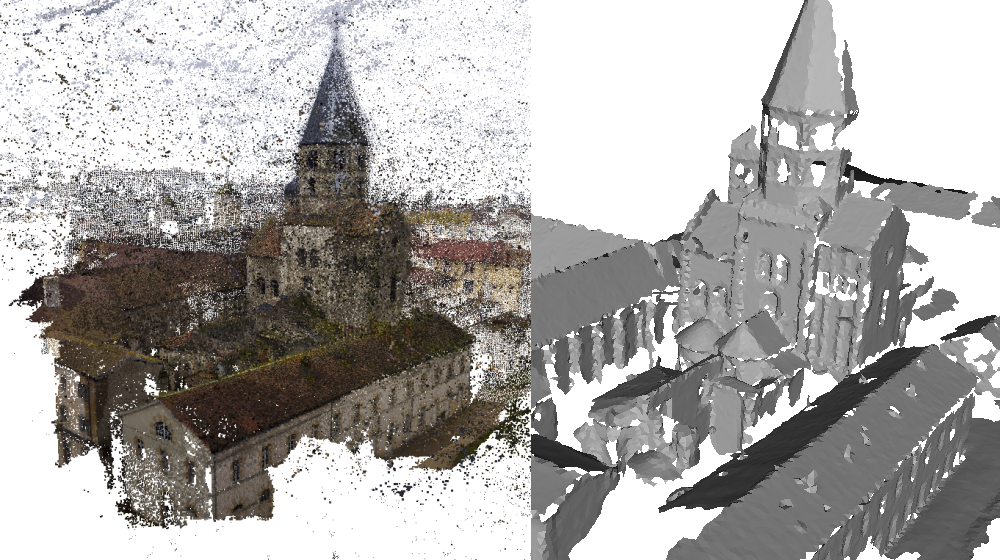
We present an original multi-view stereo reconstruction algorithm which allows the 3D-modeling of urban scenes as a combination of meshes and geometric primitives [9] . The method provides a compact model while preserving details: irregular elements are described by meshes whereas regular structures are described by canonical geometric primitives. We adopt a two-step strategy consisting first in segmenting the initial mesh-based surface using a multi-label Markov Random Field based model and second, in sampling primitive and mesh components simultaneously on the obtained partition by a Jump-Diffusion process. The quality of a reconstruction is measured by a multi-object energy model which takes into account both photo-consistency and semantic considerations (i.e. geometry and shape layout). The segmentation and sampling steps are embedded into an iterative refinement procedure which provides an increasingly accurate hybrid representation (Figure 7 ).
|
Indoor Scene Reconstruction using Primitive-driven Space Partitioning and Graph-cut
Participants : Sven Oesau, Florent Lafarge, Pierre Alliez.
In collaboration with EADS ASTRIUM
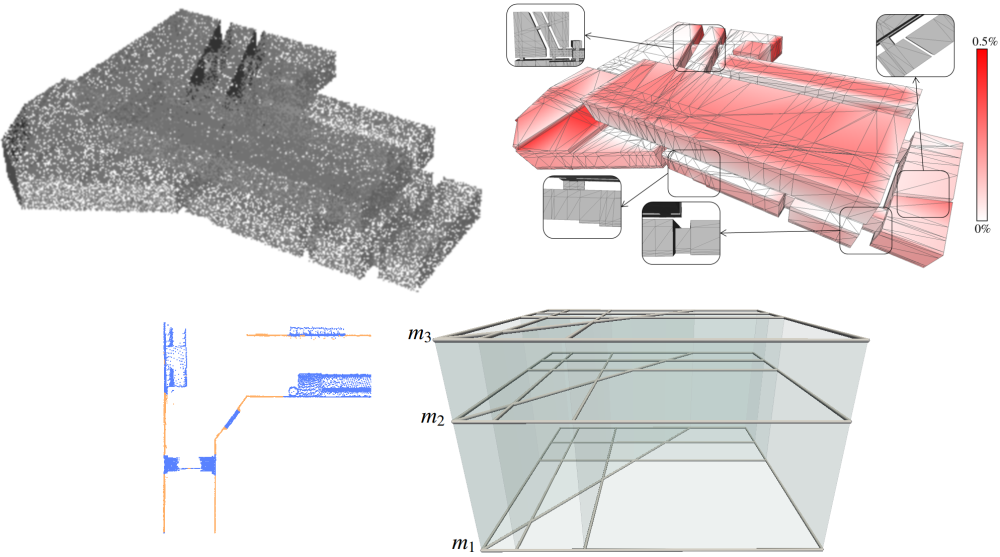
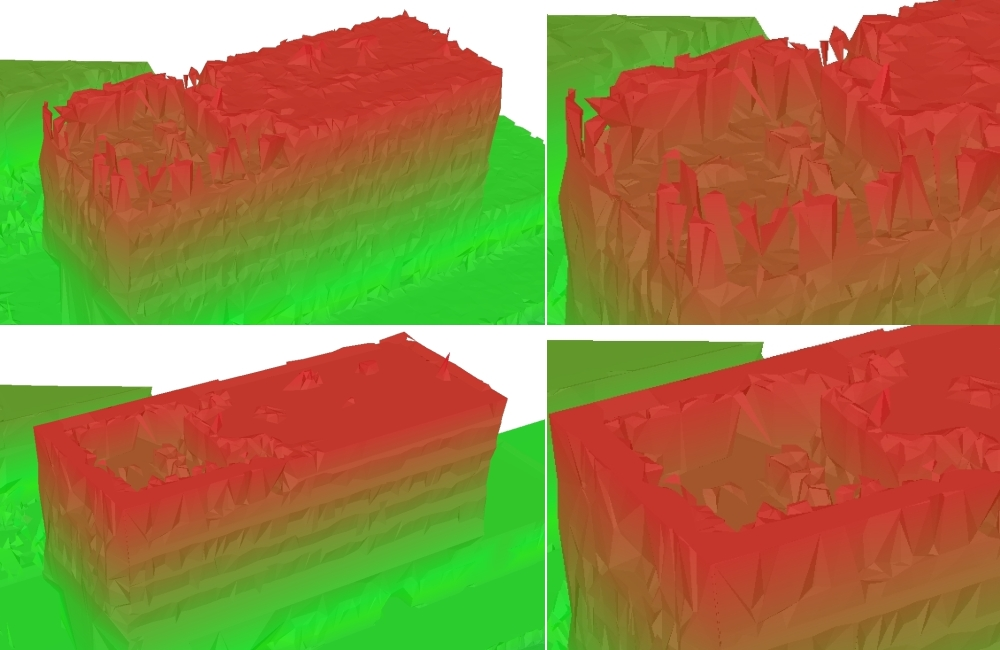
We present a method for automatic reconstruction of permanent structures of indoor scenes, such as walls, floors and ceilings, from raw point clouds acquired by laser scanners [15] . Our approach employs graph-cut to solve an inside/outside labeling of a space decomposition. To allow for an accurate reconstruction the space decomposition is aligned with permanent structures. A Hough Transform is applied for extracting the wall directions while allowing a flexible reconstruction of scenes. The graph-cut formulation takes into account data consistency through an inside/outside prediction for the cells of the space decomposition by stochastic ray casting, while favoring low geometric complexity of the model. Our experiments produces watertight reconstructed models of multi-level buildings and complex scenes (Figure 8 ).
Watertight Scenes from Urban LiDAR and Planar Surfaces
Participant : Thijs Van Lankveld.
In collaboration with Marc Van Kreveld and Remco Veltkamp
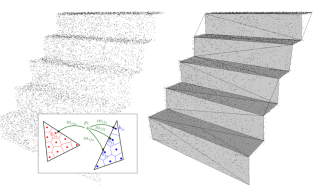
The demand for large geometric models is increasing, especially of urban environments. This has resulted in production of massive point cloud data from images or LiDAR. Visualization and further processing generally require a detailed, yet concise representation of the scene's surfaces. Related work generally either approximates the data with the risk of over-smoothing, or interpolates the data with excessive detail. Many surfaces in urban scenes can be modeled more concisely by planar approximations. We present a method that combines these polygons into a watertight model [10] . The polygon-based shape is closed with free-form meshes based on visibility information. To achieve this, we divide 3-space into inside and outside volumes by combining a constrained Delaunay tetrahedralization with a graph-cut. We compare our method with related work on several large urban LiDAR data sets. We construct similar shapes with a third fewer triangles to model the scenes. Additionally, our results are more visually pleasing and closer to a human modeler's description of urban scenes using simple boxes (Figure 10 ).
Feature-Preserving Surface Reconstruction and Simplification from Defect-Laden Point Sets
Participant : Pierre Alliez.
In collaboration with David Cohen-Steiner, Julie Digne, Mathieu Desbrun and Fernando de Goes
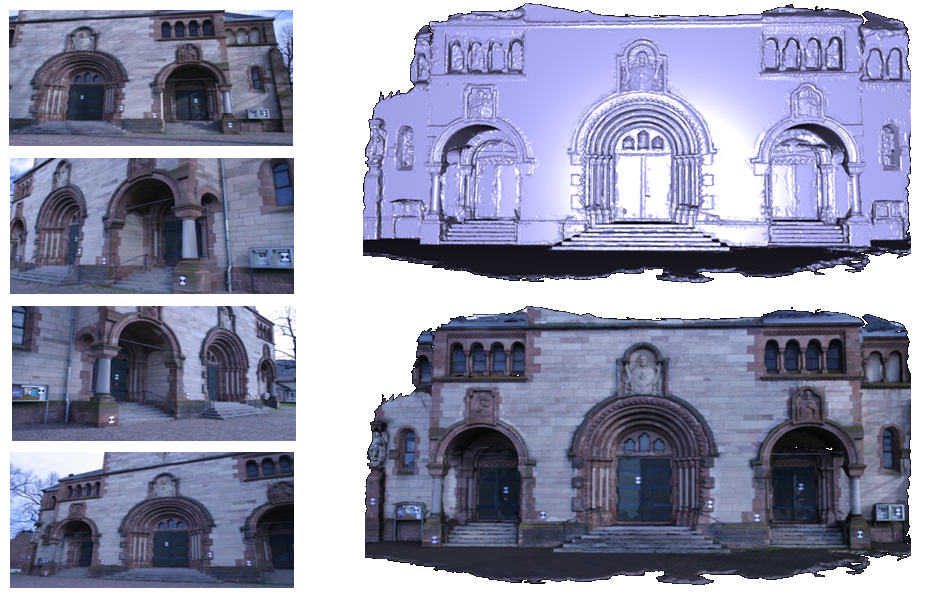
We introduce a robust and feature-capturing surface reconstruction and simplification method that turns an input point set into a low triangle-count simplicial complex [5] . Our approach starts with a (possibly non-manifold) simplicial complex filtered from a 3D Delaunay triangulation of the input points. This initial approximation is iteratively simplified based on an error metric that measures, through optimal transport, the distance between the input points and the current simplicial complex, both seen as mass distributions. Our approach exhibits both robustness to noise and outliers, as well as preservation of sharp features and boundaries (Figure 10 ). Our new feature-sensitive metric between point sets and triangle meshes can also be used as a post-processing tool that, from the smooth output of a reconstruction method, recovers sharp features and boundaries present in the initial point set.
Splat-based Surface Reconstruction from Defect-Laden Point Sets.
Participant : Pierre Alliez.
In collaboration with Mariette Yvinec (EPI GEOMETRICA), Ricard Campos (University of Girona), Raphael Garcia (University of Girona)
We introduce a method for surface reconstruction from point sets that is able to cope with noise and outliers. First, a splat-based representation is computed from the point set. A robust local 3D RANSAC-based procedure is used to filter the point set for outliers, then a local jet surface – a low-degree surface approximation – is fitted to the inliers. Second, we extract the reconstructed surface in the form of a surface triangle mesh through Delaunay refinement (Figure 11 ). The Delaunay refinement meshing approach requires computing intersections between line segment queries and the surface to be meshed. In the present case, intersection queries are solved from the set of splats through a 1D RANSAC procedure. [3] .