Section: New Software and Platforms
Hardware
Poppy Platform
Participants : Matthieu Lapeyre [correspondant] , Pierre Rouanet, Jonathan Grizou, Pierre-Yves Oudeyer [supervisor] .
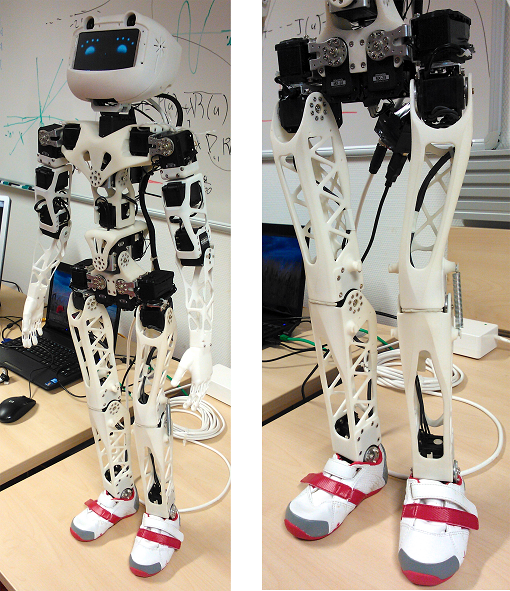
The Poppy Project [54] , [53] , [23] (see Figure 13 , http://www.matthieu-lapeyre.com/thesis.pdf ) develops an open-source 3D printed humanoid platform based on robust, flexible, easy-to-use and reproduce hardware and software. In particular, the use of 3D printing and rapid prototyping technologies is a central aspect of this project, and makes it easy and fast not only to reproduce the platform, but also to explore morphological variants. Poppy targets three domains of use: science, education and art (see http://www.poppy-project.org ).
Poppy was initially designed with a scientific objective, aiming to be a new experimental platform opening the possibility to systematically study the role of morphology in sensorimotor control, in human-robot interaction and in cognitive development. Indeed, a suitable design of a robot morphology can greatly simplify control problems, increase robustness, and open new modes of interaction with the physical and social world. Thus, being able to study the body as an experimental variable, something which can be systematically changed and experimented, is of paramount importance. Yet, until recently it was complicated because building a robot relied on heavy and costly manufacturing techniques. 3D printing has changed the landscape of what is possible: Poppy Project transposed it to humanoid robotics, and it is now possible to explore new body shapes in just a few days. It enables and simplifies the experimentation, the reproduction and the modification of the morphology in research laboratories. It also allows collaborative working, sharing and replication of the results on these issues between laboratories. The ambition is to become a reference platform for benchmarking and dissemination of scientific results.
Thanks to the fact that it integrates advanced and yet easily accessible techniques in an embodiment that motivates students and the wider public, this platform also meets a growing societal need: education and training in technologies combining computer science, electronics and mechanics, as well as a training tool to the emergent revolutionary 3D printing process. With its openness, its design and its rather low-cost, Poppy provides a unique context for experimentation and learning of these technologies in a Do-It-Yourself (DIY) approach. Several experiences with Poppy in secondary, high schools, science museums and Fablabs in France and abroad are underway and will be discussed in the incoming sections. Finally, the possibility to easily modify both the hardware and the software also makes Poppy a useful tool for artistic projects working with interactive computerized installations.
Open-Source Robotic Platform
Poppy is the first complete 3D printed open-source and open-hardware humanoid robot. Its 3D printed skeleton and its Arduino-based electronics are open-hardware (Creative Commons). Its software is open-source (GPL V3), and allows programming beginners as well as advanced roboticists to control the robot in Python thanks to the PyPot library (https://github.com/poppy-project/pypot ). Its motors are common off-the-shell Robotis actuators (http://www.robotis.com/xe/dynamixel_en ), and allow for compliant control and soft physical human-robot interaction. Poppy presents an original mechanical structure which permits to obtain a light structure with 3.5kg for 84cm height. Before the arrival of 3D printing techniques, this kind of complex structure was either impossible to produce or extremely expensive. Now, anyone can produce and modify such robot in their home using affordable personal 3D printers.
Several web tools support collaboration and sharing among members of the Poppy community: a portal web site (www.poppy-project.org ), GitHub repositories for the hardware and software with associated wikis for documentation (www.github.com/poppy-project/ ), and a forum based on Discourse (www.discourse.org ) technology (forum.poppy-project.org ).