Section: Partnerships and Cooperations
European Initiatives
FP7 & H2020 Projects
CABLEBOT
-
Objective: to develop a new generation of modular and reconfigurable robots able to perform many different steps in the post-production of large-scale structures.
-
Partner: TECNALIA (Spain), CNRS-LIRMM, FRAUNHOFFER-IPA, UDE, Inria, EADS, ACCIONA, VICINAY
-
Abstract: The CABLEBOT project (http://www.cablebot.eu/ ) deals with a novel methodology for designing, developing and evaluating cable robots customized for the automation in large-scale auxiliary processes. Parallel cable robots extend the payloads and workspace of conventional industrial robots by more than two orders of magnitude. The main objective is to develop a new generation of modular and reconfigurable robots able to perform many different steps in the post-production of large-scale structures. Three key technologies will be developed: a) Design of Cable Robot: Software tools to design the layout and geometry of cable robots, b) Industrial Process Planning: Simulation of cable robots to verify the operation of cable robots in environments with large-scale structures c) Control Algorithms and Systems: Distributed control and kinematic transformation to operate modular cable robots. Two application examples are targeted in close cooperation to industry: aeronautical applications of maintenance and the handling of construction beams. In both cases existing automation can hardly be used due to maneuverability of heavy and big parts and the risk associated. The results are feasible for many other fields including large-workspace movements of products, with impact in logistics, transport, and warehousing. The exploitation and commercialization of CABLEBOT are driven by VICINAY CEMVISA, the application of industrial scenarios, two end-users of different sectors - EADS and ACCIONA - will automate their currently manual post-production. TECNALIA provides the technology for simulation in terms of productivity, cost, safety and robustness, whereas the design of the robots is in charge of LIRMM and Inria. IPA and UDE are in charge of the control algorithms, on distributed and force control of redundant systems. Benefits include an increase of production efficiency, a wider range of products, light and reconfigurable structure mechanisms and adaptable and more flexible operator assistance systems.
RAPP
-
Objective: Robotic Applications for Delivering Smart User Empowering Applications
-
Partner: CERTH/ITI(Greece), Inria, WUT (Poland), ORTELIO (UK), ORMYLIA (Greece), INGEMA (Spain)
-
Inria contact: David Daney, Jean-Pierre Merlet, Manuel Serrano
-
Abstract: s our societies are affected by a dramatic demographic change, in the near future elderly and people requiring support in their daily life will increase and caregivers will not be enough to assist and support them. Socially interactive robots can help to confront this situation not only by physically assisting people but also functioning as a companion. The increasing sales figures of robots are pointing that we are in front of a trend break for robotics. To lower the cost for developers and to increase their interest on developing robotic applications, the RAPP introduces the idea of robots as platforms. RAPP (Robotic Applications for Delivering Smart User Empowering Applications) will provide a software platform in order to support the creation and delivery of robotics applications (RAPPs) targeted to people at risk of exclusion, especially older people. The open-source software platform will provide an API that contains the functionalities for implementing RAPPs and accessing the robot’s sensors and actuators using higher level commands, by adding a middleware stack with added functionalities suitable for different kinds of robots. RAPP will expand the computational and storage capabilities of robots and enable machine learning operations, distributed data collection and processing, and knowledge sharing among robots in order to provide personalized applications based on adaptation to individuals. The use of a common API will assist developers is creating improved applications for different types of robots that target to people with different needs, capabilities and expectations, while at the same time respect their privacy and autonomy, thus the proposed RAPP Store will have a profound effect in the robotic application market. The results of RAPP will be evaluated through the development and benchmarking of social assistive RAPPs, which exploit the innovative features (RAPP API, RAPP Store, knowledge reuse, etc.) introduced by the proposed paradigm.
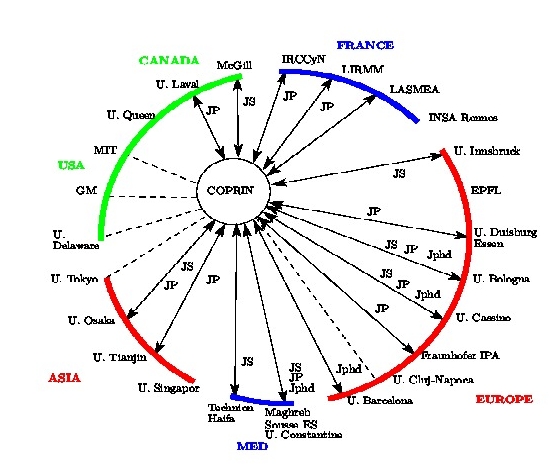
Collaborations with Major European Organizations
Our collaboration are described in the figure 1 .