Section: New Results
Analysis
Planar Shape Detection and Regularization in Tandem
Participants : Sven Oesau, Florent Lafarge, Pierre Alliez.
In collaboration with EADS ASTRIUM
We contributed a method for planar shape detection and regularization from raw point sets. The geometric modeling and processing of man-made environments from measurement data often relies upon robust detection of planar primitive shapes. In addition, the detection and reinforcement of regularities between planar parts is a means to increase resilience to missing or defect-laden data as well as to reduce the complexity of models and algorithms down the modeling pipeline. The main novelty behind our method is to perform detection and regularization in tandem. We first sample a sparse set of seeds uniformly on the input point set, then perform in parallel shape detection through region growing, interleaved with regularization through detection and reinforcement of regular relationships (coplanar, parallel and orthogonal). In addition to addressing the end goal of regularization, such reinforcement also improves data fitting and provides guidance for clustering small parts into larger planar parts (Figure 1 ). We evaluate our approach against a wide range of inputs and under four criteria: geometric fidelity, coverage, regularity and running times. Our approach compares well with available implementations such as the efficient RANSAC-based approach proposed by Schnabel and co-authors in 2007 [8] . This work has been published in the Computer Graphics Forum journal.
|
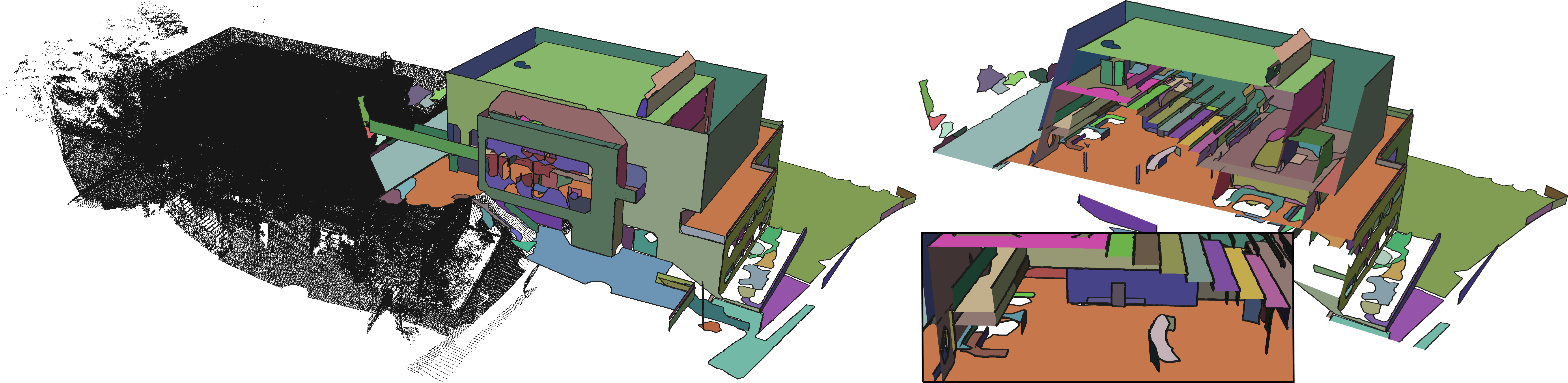
Image partitioning into convex polygons
Participants : Liuyun Duan, Florent Lafarge.
In collaboration with Geoimage
The over-segmentation of images into atomic regions has become a standard and powerful tool in Vision. Traditional superpixel methods, that operate at the pixel level, cannot directly capture the geometric information disseminated into the images. We propose an alternative to these methods by operating at the level of geometric shapes. Our algorithm partitions images into convex polygons. It presents several interesting properties in terms of geometric guarantees, region compactness and scalability. The overall strategy consists in building a Voronoi diagram that conforms to preliminarily detected line-segments, before homogenizing the partition by spatial point process distributed over the image gradient. Our method is particularly adapted to images with strong geometric signatures, typically man-made objects and environments (Figure 2 ). We show the potential of our approach with experiments on large-scale images and comparisons with state-of-the-art superpixel methods [17] . This work has been published in the Computer Graphics Forum journal. Published in the proceedings of CVPR (IEEE conference on Computer Vision and Pattern Recognition).
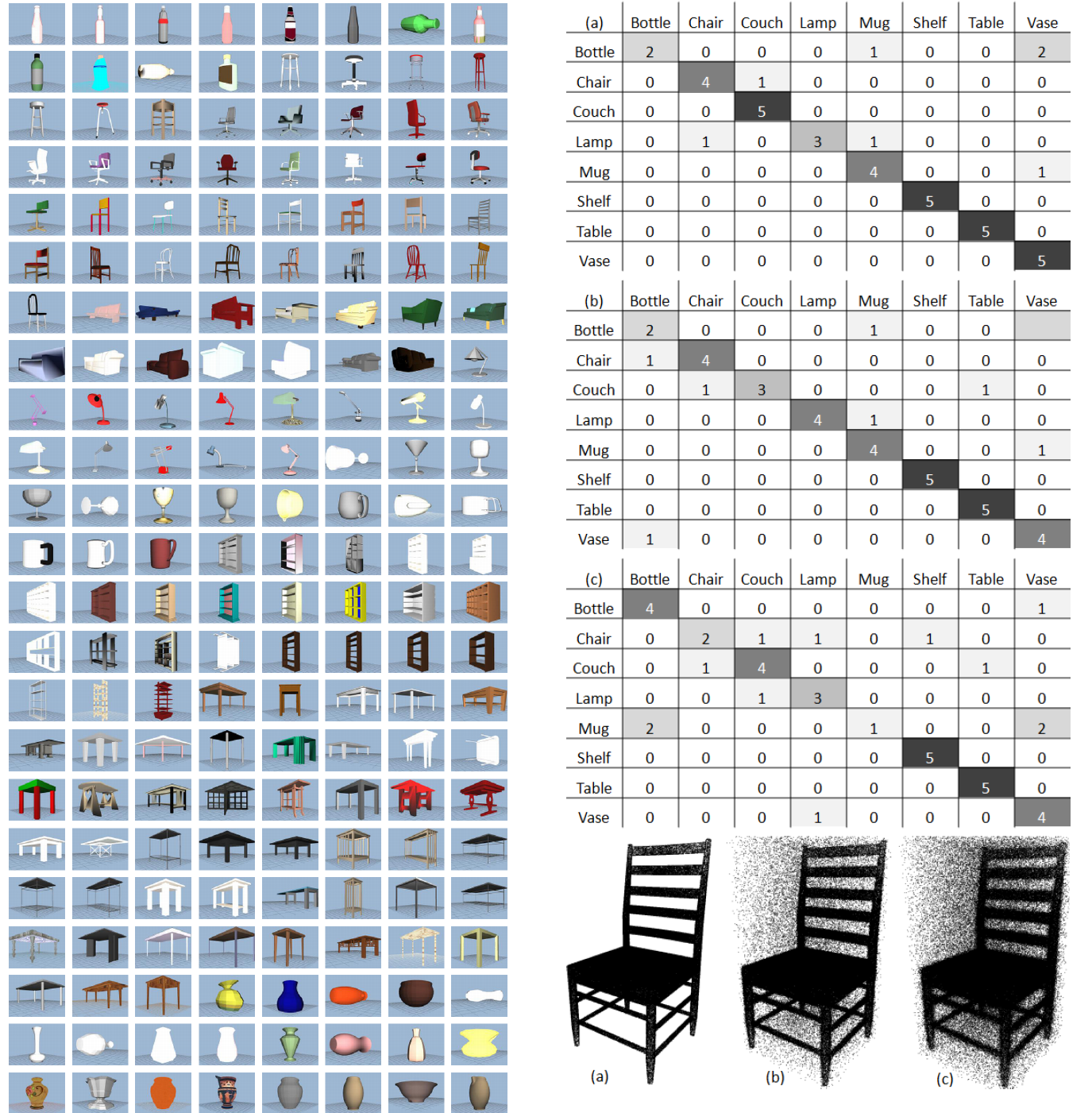
Object Classification via Planar Abstraction
Participants : Sven Oesau, Florent Lafarge, Pierre Alliez.
In collaboration with EADS ASTRIUM.
We contributed a supervised machine learning approach for classification of objects from sampled point data. The main idea consists in first abstracting the input object into planar parts at several scales, then discriminate between the different classes of objects solely through features derived from these planar shapes. Abstracting into planar shapes provides a means to both reduce the computational complexity and improve robustness to defects inherent to the acquisition process. Measuring statistical properties and relationships between planar shapes offers invariance to scale and orientation. A random forest is then used for solving the multiclass classification problem. We demonstrate the potential of our approach on a set of indoor objects from the Princeton shape benchmark and on objects acquired from indoor scenes and compare the performance of our method with other point-based shape descriptors [22] (see Figure 3 ).
|
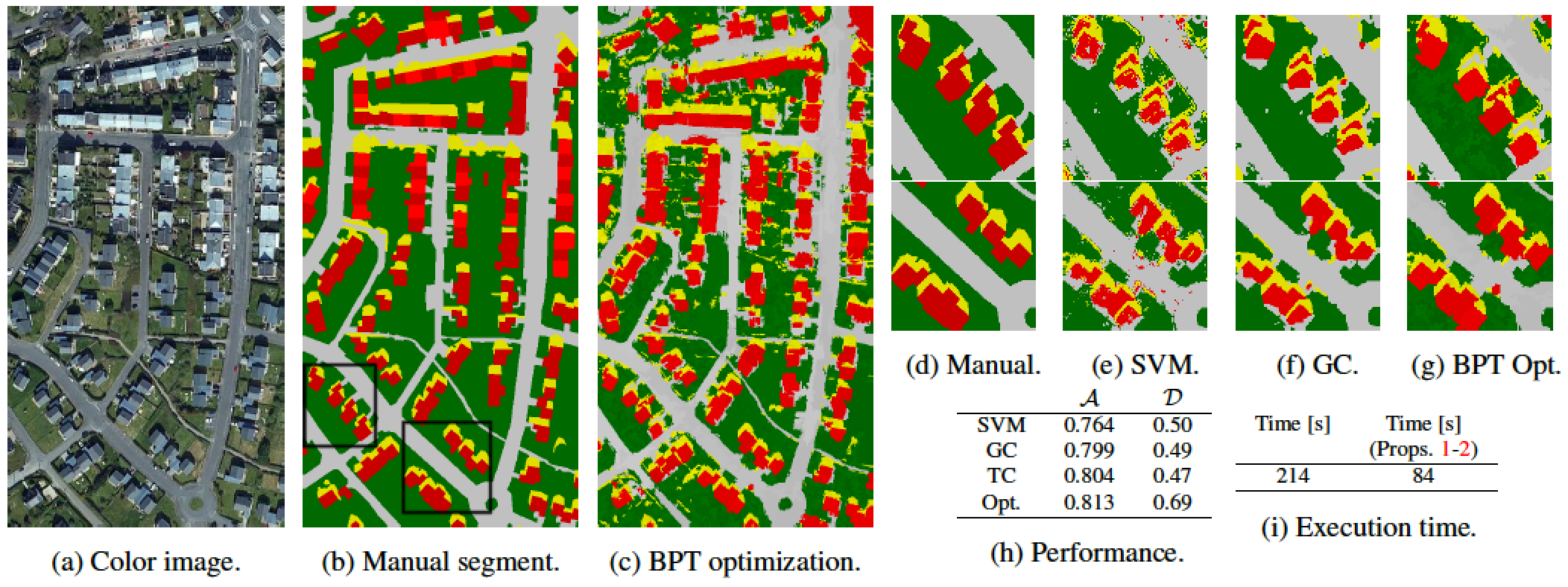
Optimizing partition trees for multi-object segmentation with shape prior
Participants : Emmanuel Maggiori, Yuliya Tarabalka.
This work has been done in collaboration with Dr. Guillaume Charpiat (TAO team, Inria Saclay).
Partition trees, multi-class segmentation, shape priors, graph cut.
A partition tree is a hierarchical representation of an image. Once constructed, it can be repeatedly processed to extract information. Multi-object multi-class image segmentation with shape priors is one of the tasks that can be efficiently done upon an available tree. The traditional construction approach is a greedy clustering based on color similarities. However, not considering higher level cues during the construction phase leads to trees that might not accurately represent the underlying objects in the scene, inducing mistakes in the later segmentation. We proposed a method to optimize a tree based both on color distributions and shape priors [15] . It consists in pruning and regrafting tree branches in order to minimize the energy of the best segmentation that can be extracted from the tree. Theoretical guarantees help reduce the search space and make the optimization efficient. Our experiments (see Figure 4 ) show that we succeed in incorporating shape information to restructure a tree, which in turn enables to extract from it good quality multi-object segmentations with shape priors. Published in the proceedings of BMVC (British Machine Vision Conference).
|