Section: New Software and Platforms
Platforms
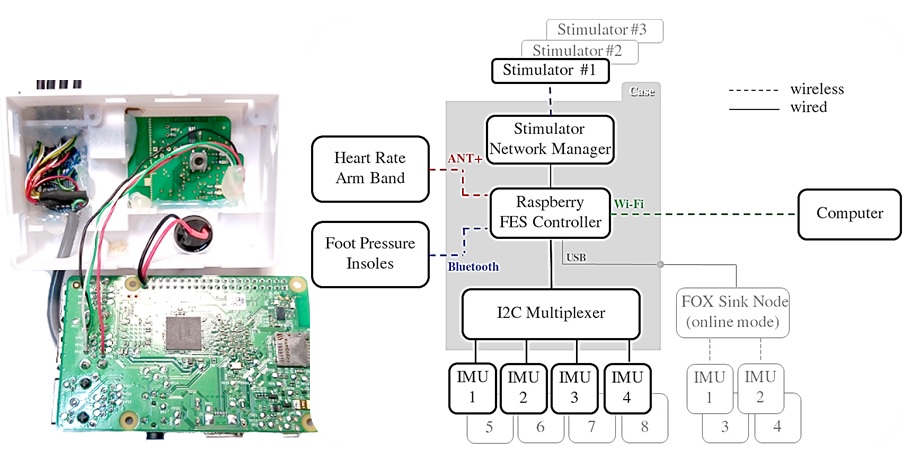
Modular embedded architecture for real time control of a FES system
Participants : Christine Azevedo Coste, Benoît Sijobert, Ronan Le Guillou.
The results presented in section 6.2 and 6.3 have led to the development of a new hardware and software architecture embedding a network of sensors and actuators interfaced to a controller, as part of Benoît Sijobert's PhD work and ADT STIMBIO (Ronan Le Guillou). In order to solve numerous issues and constraints observed during experiments, a new hardware and software architecture has been elaborated. The decision was made to decentralize the controller (i.e. the computer) directly on the participant, thereby relocating the essential wireless links around the user. For this purpose, a mini low-cost single board computer (Raspberry Pi3) was embedded in a 3D-printed case strapped around the waist of the subject. Using wireless inertial sensors connected as a WBAN, the sink node gets the data from all the IMUs, therefore highly decreasing the data flow when multiple IMUs were transmitting inside the network. To get rid of this limitation and guarantee an overall 100 Hz sampling rate no matter the number of IMUs, the wireless inertial sensors can be replaced by wired ones, low-cost with a high speed ARM Cortex-M0 based processor and a Kalman Filter directly providing quaternion estimation at 100 Hz for each IMU. The use of a multiplexer connected through an I2C interface (Inter Integrated Circuit) enabled to keep a 100 Hz rate using 4 IMUs.
The stimulator used in the experiments was a wireless programmable and controllable device. Latency issues and communication losses were observed when the computer sending the command to the stimulator was too far or if an obstacle was present between the computer and the participant wearing the stimulator. Taking advantage of the FES controller located on the subject to control the stimulator nearby has enabled us to solve this issue.
In this configuration, this autonomous FES controller is able to acquire the data, process them, execute control algorithms and send the appropriate stimulation command to the stimulator. For safety reasons, in order to access to the FES controller and to enable a remote access to the stimulation from a computer, an ad-hoc Wi-Fi network is automatically provided by the Raspberry on start-up. The ad-hoc network enables to be independent of a network infrastructure where the connection is not always possible (e.g. Wi-Fi network from the hospital).
This scalable architecture (Figure 3), developed as a modular system, now allows us to implement various new commands laws for Real Time closed loop control as well as giving us the ability to switch sensors and stimulators to meet the needs of specific applications. As part of making this system available for future projects in the team, the ability to easily change stimulators depending of the requirements was needed. To achieve this and in order for the FES architecture to directly control them, Application Programming Interfaces (APIs) were developed for 3 main commercial stimulators in the team. They each corresponds to a specific need and use case. The Vivaltis Phoenix Stimulator allows for low-weight embedding, wireless network control, but only 2 stimulation channels by pod, while being scalable. The BerkelBike Stimulator v2.0 presents a cumbersome but extended control compromise with 8 independent stimulation channels, which is an ideal solution for recumbent FES-assisted cycling. And finally the Hasomed Rehastim v1.0 allowing fine control but isn't battery powered in its commercial version and is not produced anymore.
This new architecture is currently used in clinical experiments and will continue to evolve with a goal of being easy to use, even by untrained clinicians. A funding (EDF Foundation) has been obtained by our clinical partner "CRF La Châtaigneraie" to perform a clinical protocol including 6 patients from which one will participate in the Cybathlon 2020 using this hardware and software architecture. The inclusions will begin in January 2019.
|
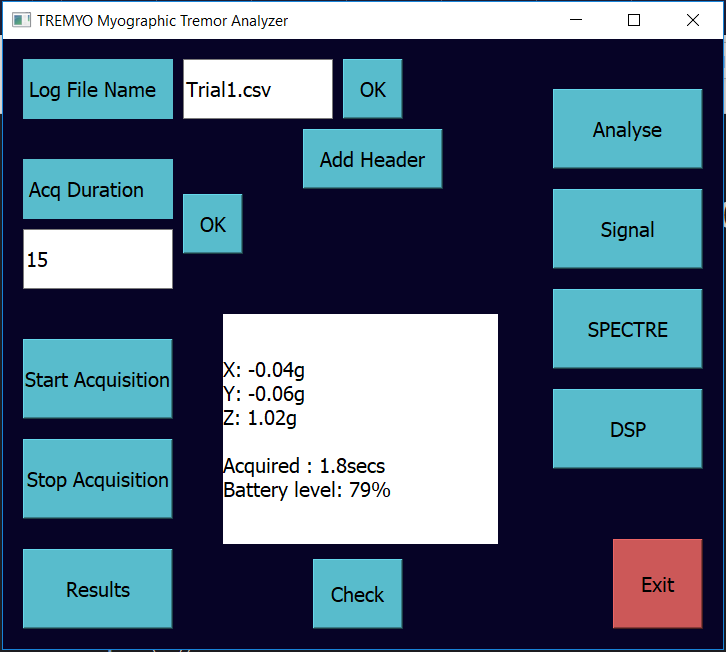
Tremor monitoring system based on acceleration detection in Parkinson's Disease
Participants : Christine Azevedo Coste, Ronan Le Guillou.
As part of a preliminary study on the effects of Mindfulness meditation for patients with Parkinson's Disease (PD), an application was developed to monitor the accelerometer of a wrist worn device. The hypothesis being that reducing the cognitive load of a PD patient might reduce the severity of the tremors. We investigated a few devices that might correspond to our requirements : smartwatches, Myo armbands, Inertial Measurement Units,...Having already a Thalmic Myo Armband (Figure 4) we developed a program acquiring the accelerometer data in Real Time and logging it, as well as doing pre-processing and displaying it on the screen of the clinician to allow him to monitor the session. While this system was ready and already tested, we had to search for another solution due to the termination of the commercial product. We then selected the smartwatch Samsung Gear S3 as a possible alternative and the dedicated application is currently under development.