

Section: New Results
Applications in Educational Technologies
Machine Learning for Adaptive Personalization in Intelligent Tutoring Systems
Participants : Benjamin Clement, Alexandra Delmas, Pierre-Yves Oudeyer [correspondant] , Didier Roy, Helene Sauzeon.
The Kidlearn project
Kidlearn is a research project studying how machine learning can be applied to intelligent tutoring systems. It aims at developing methodologies and software which adaptively personalize sequences of learning activities to the particularities of each individual student. Our systems aim at proposing to the student the right activity at the right time, maximizing concurrently his learning progress and its motivation. In addition to contributing to the efficiency of learning and motivation, the approach is also made to reduce the time needed to design ITS systems.
We continued to develop an approach to Intelligent Tutoring Systems which adaptively personalizes sequences of learning activities to maximize skills acquired by students, taking into account the limited time and motivational resources. At a given point in time, the system proposes to the students the activity which makes them progress faster. We introduced two algorithms that rely on the empirical estimation of the learning progress, RiARiT that uses information about the difficulty of each exercise and ZPDES that uses much less knowledge about the problem.
The system is based on the combination of three approaches. First, it leverages recent models of intrinsically motivated learning by transposing them to active teaching, relying on empirical estimation of learning progress provided by specific activities to particular students. Second, it uses state-of-the-art Multi-Arm Bandit (MAB) techniques to efficiently manage the exploration/exploitation challenge of this optimization process. Third, it leverages expert knowledge to constrain and bootstrap initial exploration of the MAB, while requiring only coarse guidance information of the expert and allowing the system to deal with didactic gaps in its knowledge. The system was evaluated in several large-scale experiments relying on a scenario where 7-8 year old schoolchildren learn how to decompose numbers while manipulating money [65]. Systematic experiments were also presented with simulated students.
Kidlearn Experiments in 2018: Evaluating the impact of ZPDES and choice on learning efficiency and motivation
An experiment was held between mars 2018 and July 2018 in order to test the Kidlearn framework in classrooms in Bordeaux Metropole. 600 students from Bordeaux Metropole participated in the experiment. This study had several goals. The first goal was to evaluate the impact of the Kidlearn framework on motivation and learning compared to an Expert Sequence without machine learning. The second goal was to observe the impact of using learning progress to select exercise types within the ZPDES algorithm compared to a random policy. The third goal was to observe the impact of combining ZPDES with the ability to let children make different kinds of choices during the use of the ITS. The last goal was to use the psychological and contextual data measures to see if correlation can be observed between the students psychological state evolution, their profile, their motivation and their learning. The different observations showed that generally, algorithms based on ZPDES provided a better learning experience than an expert sequence. In particular, they provide a better motivating and enriching experience to self-determined students. The details of these new results, as well as the overall results of this project, were presented during the PhD defense of Benjamin Clement in decembre 2018.
Fostering Health Education With a Serious Game in Children With Asthma: Pilot Studies for Assessing Learning Efficacy and Automatized Learning Personalization
Coupled with Health Education programs, an e-learning platform—KidBreath—was participatory designed [19] and assessed in situ (Study 1) and was augmented and tested with an Intelligent Tutoring System (ITS) based on Multi-Armed Bandit Methods (Study 2). For each study, the impact of KidBreath practice was assessed in children with asthma in terms of pedagogical efficacy (knowledge of the illness), pedagogical efficiency (usability, type of motivation and level of interest elicited), and therapeutic effect (illness perception, system's expectation and judgement in disease self-management, child's implication in study). For the Study 1, asthma children aged 8 to 11 years used the tool at home without time pressure for 2 months according to a predefined learning sequence defined by the research team. Results supported pedagogical efficacy of KidBreath, with a significant increase of general knowledge about asthma after use. It also featured a greater learning gain for children knowing the least about the illness before use. Results on pedagogical efficiency revealed a great intrinsic motivation elicited by KidBreath showing a deep level of interest in the edutainment activities. Study 2 explored an augmented version of KidBreath with learning optimization algorithm (called ZPDES) after its use during 1 month. Pedagogical efficacy was less conclusive than Study 1 because less content was displayed due to algorithm parameters. However, the ITS-augmented KidBreath use showed a strong impact in pedagogical efficiency and therapeutic adherence features. Even if implementation improvements must be done in future works, this preliminary study highlighted the viability of our methods to design an ITS as serious game in health education context for all chronic diseases.
Poppy Education: Designing and Evaluating Educational Robotics Kits
Participants : Pierre-Yves Oudeyer [correspondant] , Didier Roy, Thibault Desprez, Théo Segonds, Stéphanie Noirpoudre.
The Poppy Education project aims to create, evaluate and disseminate all-inclusive pedagogical kits, open-source and low cost, for teaching computer science and robotics in secondary education and higher education, scientific literacy centers and Fablabs.
It is designed to help young people to take ownership with concepts and technologies of the digital world, and provide the tools they need to allow them to become actors of this world, with a considerable socio-economic potential. It is carried out in collaboration with teachers and several official french structures (French National Education, High schools, engineering schools, ...).
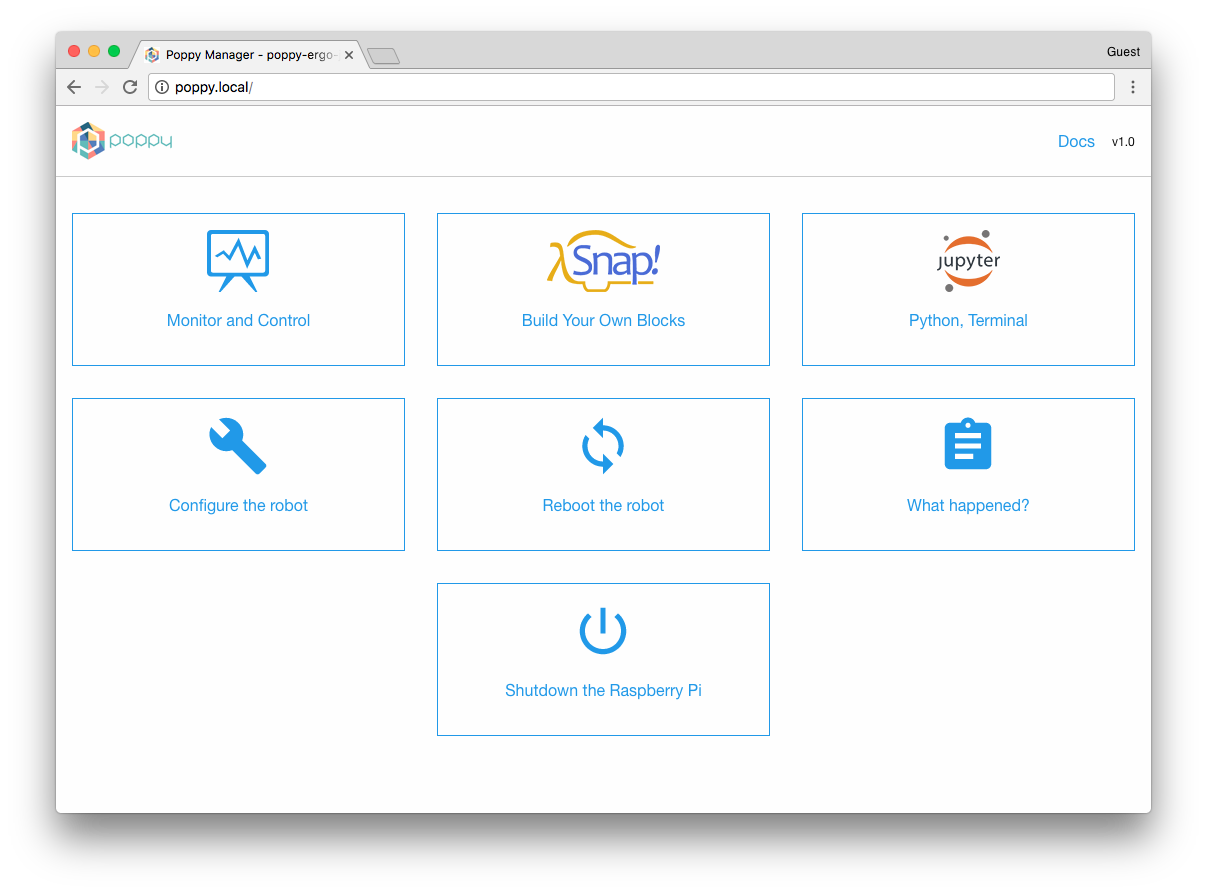
Poppy Education is based on the robotic platform poppy (open-source platform for the creation, use and sharing of interactive 3D printed robots), including:
-
web interface connection (see figure 33)
-
Poppy Humanoid, a robust and complete robotics platform designed for genuine experiments in the real world and that can be adapted to specific user needs.
-
Poppy Torso, a variant of Poppy Humanoid that can be easily installed on any flat support.
-
Ergo Jr, a robotic arm. Durable and inexpensive, it is perfect to be used in class. It can be programmed in Python, directly from a web browser, using Ipython notebooks (an interactive terminal, in a web interface for the Python Programming Language).
-
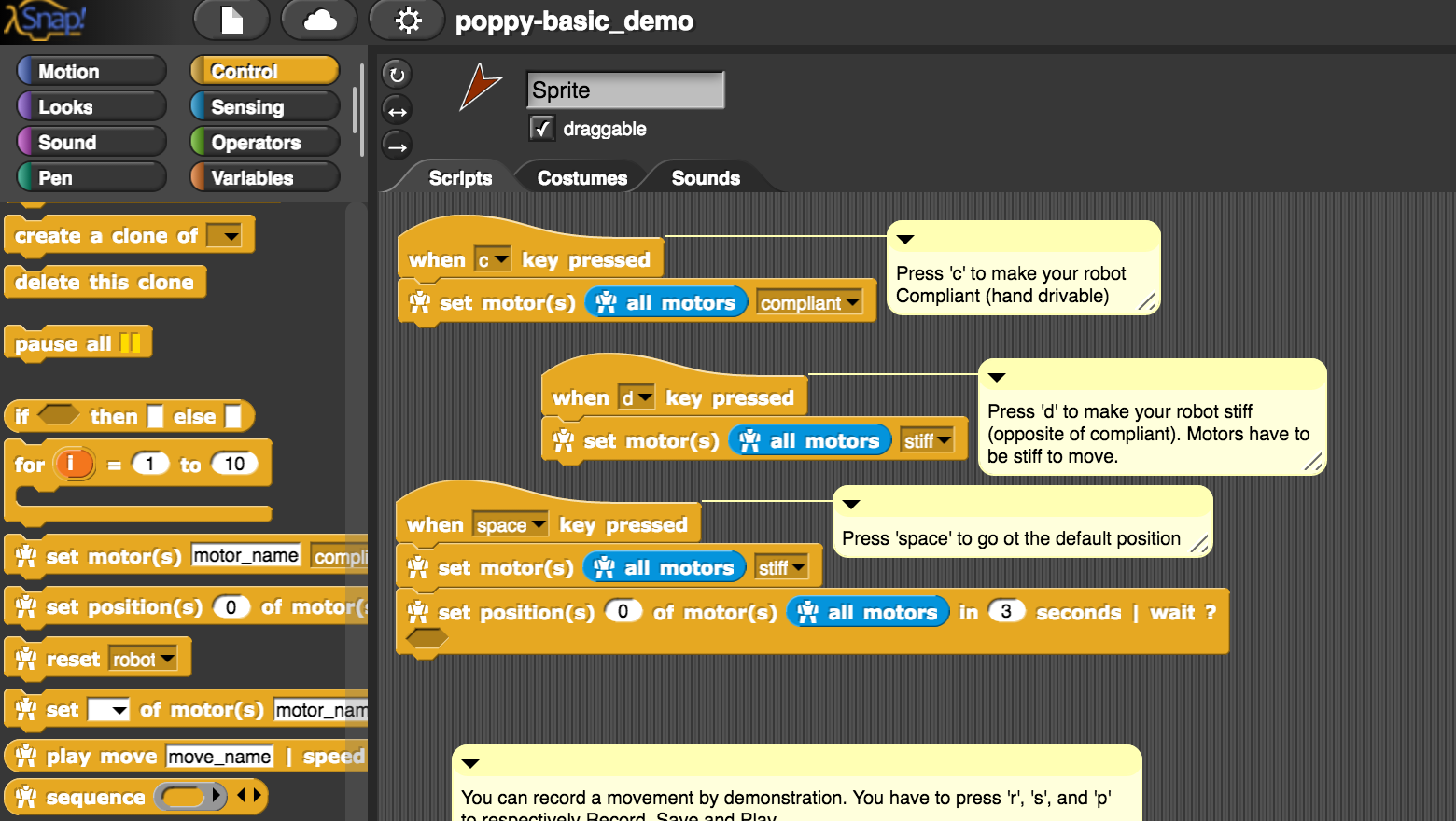
Snap. The visual programming system Snap (see figure 34), which is a variant of Scratch. Its features allow a thorough introduction of information technology. Several specific "blocks" have been developed for this.
-
C++, Java, Matlab, Ruby, Javascript, etc. thanks to a REST API that allows you to send commands and receive information from the robot with simple HTTP requests.
-
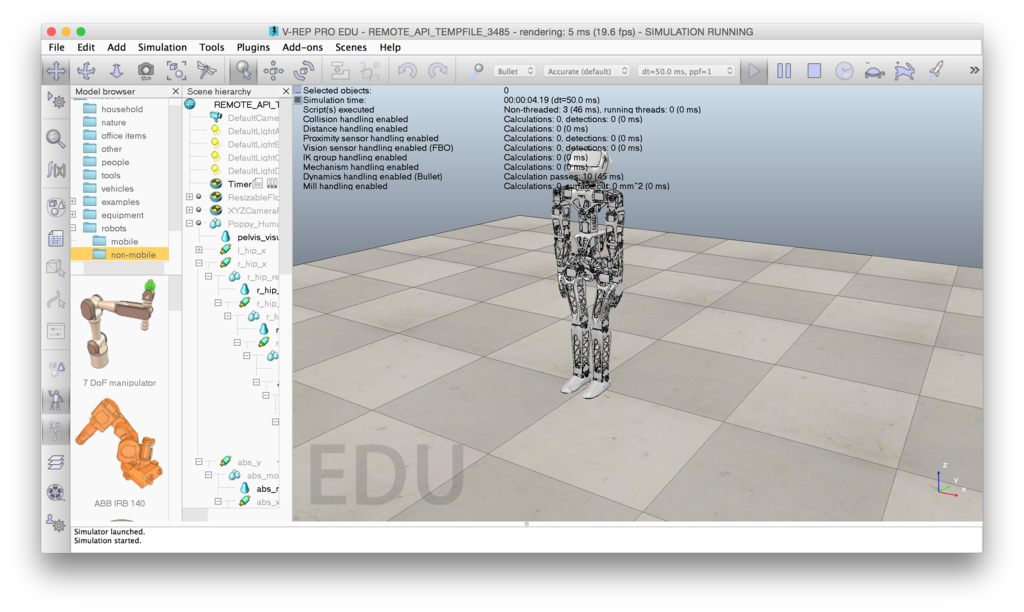
Virtual robots (Poppy Humanoid, Torso and Ergo) can be simulated with the free simulator V-REP (see figure 35). It is possible in the classroom to work on the simulated model and then allow students to run their program on the physical robot.
-
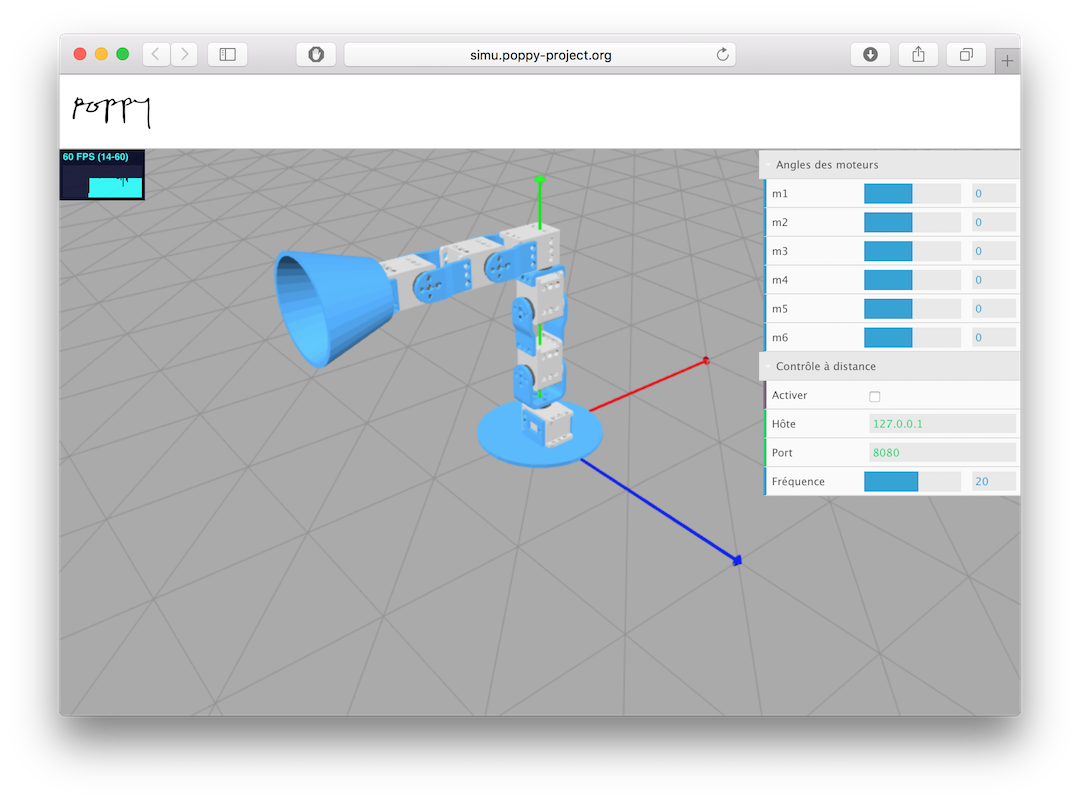
Virtual robots (Poppy Ergo) can also be simulated with a 3D web viewer (see figure 36).
Pedagogical experimentations : Design and experiment robots and the pedagogical activities in classroom.
The robots are designed with the final users in mind. The pedagogical tools of the project (robots and resources) are being created directly with the users and evaluated in real life by experiments. So teachers and researchers co-create activities, test them with students in class-room, share their experience and develop the platform as needed [120].
The activities were designed mainly with Snap! and Python. Most activities use Poppy Ergo Jr, but some use Poppy Torso (mostly in higher school due to its cost).
The pedagogical experiments in classroom carried out during the first year of the project notably allowed to create and experiment many robotic activities. These activities are designed as pedagogical resources introducing robotics. The main objective of the second year was to make all the activities and resources reusable (with description, documentation and illustration) easily and accessible while continuing the experiments and the diffusion of the robotic kits.

-
Pedagogical working group : the teacher partners continued to use the robots in the classroom and to create and test new classroom activities. We organized some training to help them to discover and learn how to use the robotics platform. Also, an engineer of the Poppy Education team went to visit the teachers in their school to see and to evaluate the pedagogical tools (robots and activities) in a real context of use.
Five meetings have been organized during the year including all teachers part of the project as well as the Poppy Education team in order to exchange about their experience using the robots as a pedagogical tool, to understand their need and to get some feedback from them. This is helping us to understand better the educational needs, to create and improve the pedagogical tools.
You can see the videos of pedagogical robotics activities here:
https://www.youtube.com/playlist?list=PLdX8RO6QsgB7hM_7SQNLvyp2QjDAkkzLn
Pedagogical documents and resources
-
We continued to improve the documentation of the robotic platform Poppy (https://docs.poppy-project.org/en/) and the documentation has been translated into French (https://docs.poppy-project.org/fr/.
We configured a professional platform to manage the translation of the documentation ( https://crowdin.com/project/poppy-docs. This platforms allows anybody to participate in the translation of the documentation to the language of their choice.
-
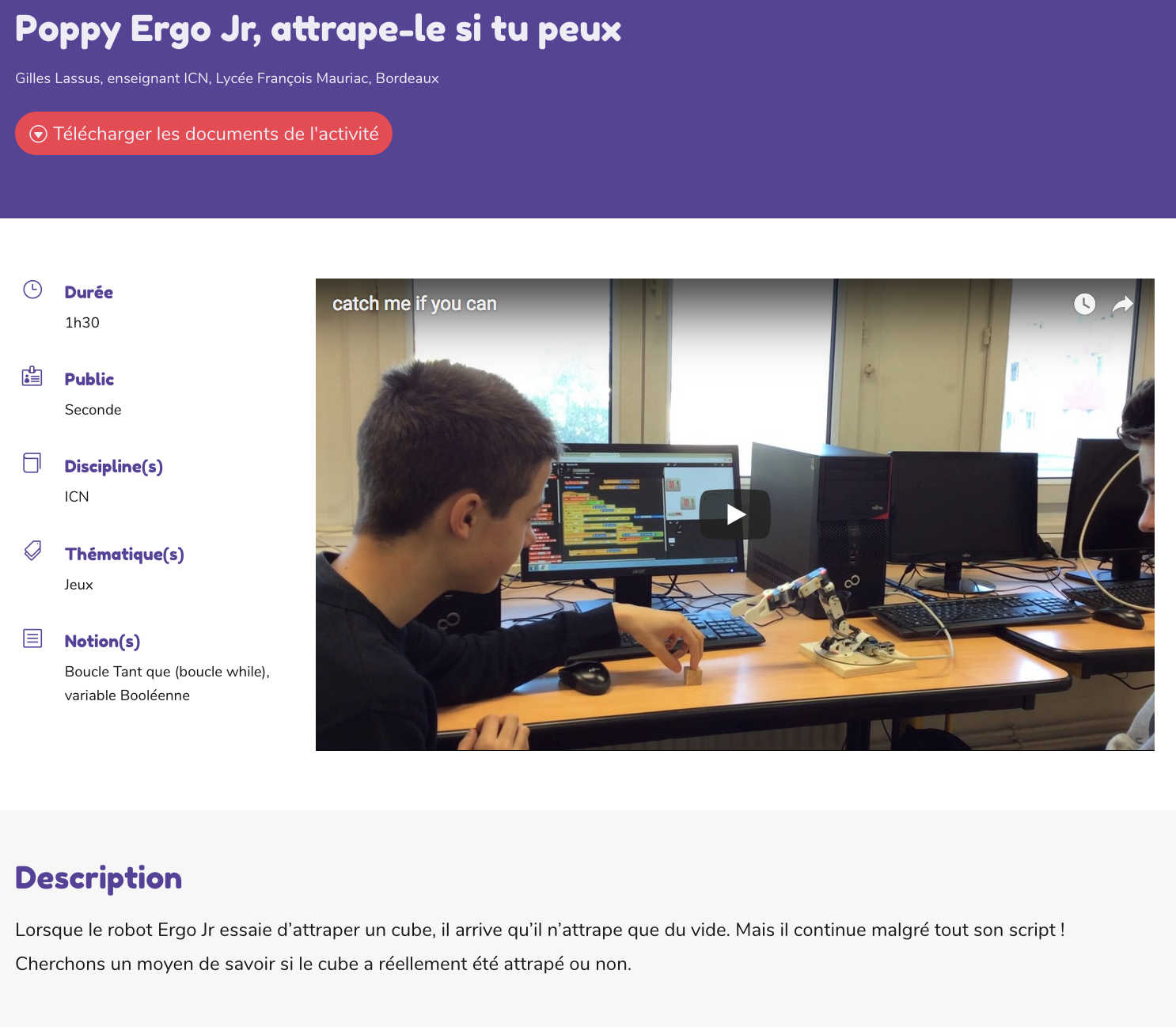
To complete the pedagogical booklet [119] that provides guided activities and small challenges to become familiar with Poppy Ergo Jr robot and the Programming language Snap! (https://hal.inria.fr/hal-01384649/document) we provided a list of Education projects. Educational projects have been written for each activity carried out and tested in class. Each project has its own web page including resources allowing any teacher to carry out the activity (description, pedagogical sheet, photos / videos, pupil's sheet, teacher's sheet with correction etc.).
The activities are available here:
https://www.poppy-education.org/activites/activites-lycee
The pedagogical activities are also available on the Poppy project forum where everyone is invited to comment and create new ones:
https://forum.poppy-project.org/t/liste-dactivites-pedagogiques-avec-les-robots-poppy/2305
-
A FAQ have been written with the most frequents questions to help the users: https://www.poppy-education.org/aide/
-
A website has been created to present the project and to share all resources and activities.
Evaluation of the pedagogical kits
The impact of educational tools created in the lab and experimented in class had to be evaluated qualitatively and quantitatively. First, the usability, efficiency and user satisfaction must be evaluated. We must therefore assess, at first, if these tools offer good usability (i.e. effectiveness, efficiency, satisfaction). Then, in a second step, select items that can be influenced by the use of these tools. For example, students' representations of robotics, their motivation to perform this type of activity, or the evolution of their skills in these areas. In 2017 we conducted experiments to evaluate the usability of kits. We also collected data on students' perceptions of robotics.
-
Our sample is made up of 28 teachers and 146 students from the region Nouvelle Aquitaine. Each subject completed an online survey in June 2017. Here, we study several groups of individuals: teachers and students. Among the students we are interested in those who practiced classroom activities with the Ergo Jr kit during the school year 2016 - 2017 (N = 68) (age = 16, std = 2.44). Among these students, 37 where High School students following the "Computer Science and Digital Sciences" stream (BAC S option ISN), 12 followed the stream "Computer and Digital Creation" (BAC S option ICN) and 18 where in Middle School.
Among the 68 students, 13 declared having used the educational booklet provided in the kit and 16 declared having used other robotic kits. Concerning the time resource dedicated to activities with the robot, 30 students declared having spent less than 6 hours, 22 declared between 6 and 25 hours, and 16 declared having spent more than 25 hours.
have practiced less than 6 hours of activity with the robot (N = 30), between 6 and 25 hours (N = 22) or more than 25 hours (N = 16); having built the robot (N = 12); have used the visual programming language Snap! (N = 46), the language of Python textual programming (N = 21), both (N = 8) or none (N = 9), it should be noted that these two languages are directly accessible via the main interface of the robot.
-
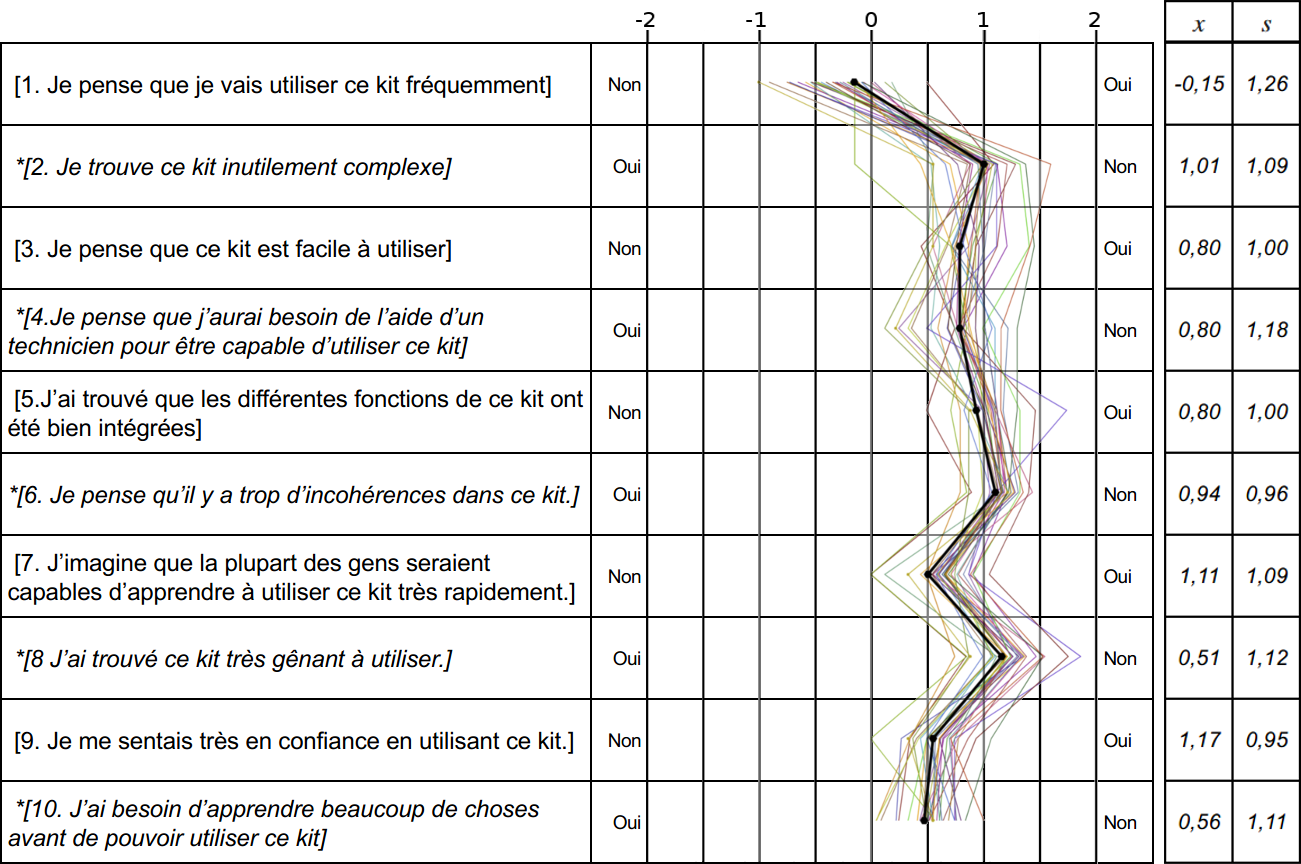
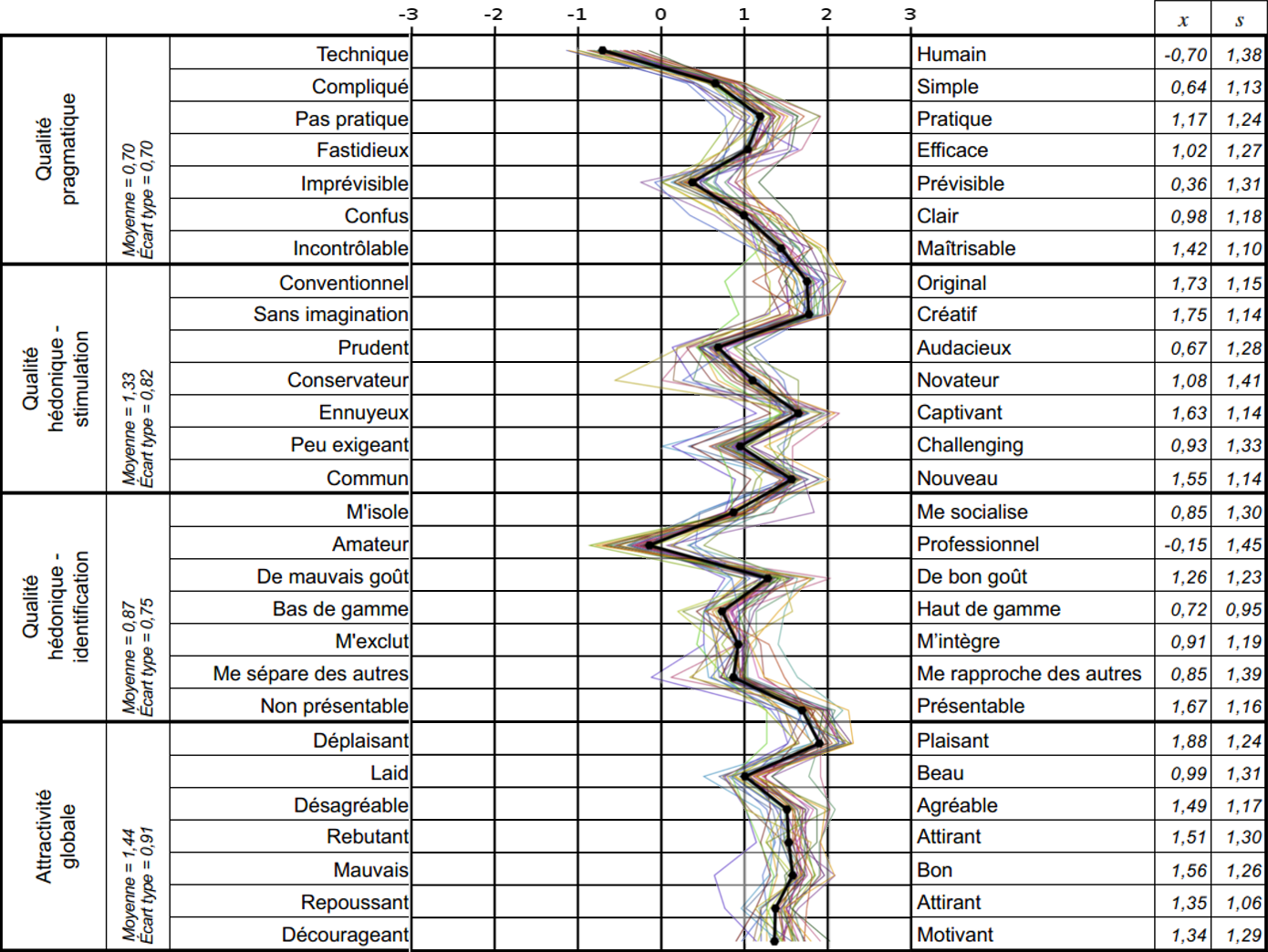
We have selected two standardized surveys dealing with this issue: SUS (The Systeme Usability Scales) [59] and The AttrakDiff [96]. These two surveys are complementary and allow to identify the design problems and to account for the perception of the user during the activities. The results of these surveys are available in the article (in French) [26] published at the conference Didapro (Lausanne Feb, 2018). Figures 39 and 40 show the averages of the 96 respondents (68 students + 28 teachers) for each of the 10 statements from the SUS and 28 pairs of antonyms to be scored on a scale of 1 to 5 and a 7-point scale, respectively.
-
Evaluation of impact on learner
One of the objectives of the integration of digital sciences in school is to allow students to have a better understanding of the technological tools that surround them daily (i.e. web, data, algorithm, connected object, etc.). So, we wanted to measure how the practice of activities with ErgoJr robot had changed this apprehension; especially towards robots. For that, we used a standardized survey: "attitude towards robot" EuroBarometer 382 originally distributed in 2012 to more than 1000 people in each country of the European Union. On the one hand, we sought to establish whether there had been a change in response between 2012 and 2017, and secondly whether there was an impact on the responses of 2017 according to the participation, or not, in educational activities with ErgoJr robot. The analysis of the results is in progress and will be published in 2019.
-
Web page for the experimentations
To facilitate the storage of documents, their availability, and to highlight some information and news, a page dedicated to the experimentations is now available on the website. https://www.poppy-education.org/evaluation/
Partnership on education projects
-
The Arts and Métiers campus at Bordeaux-Talence in partnership with Inria wishes to contribute to its educational and scientific expertise to the development of new teaching methods and tools. The objective is to develop teaching sequences based on a project approach, relying on an attractive multidisciplinary technological system: the humanoid Inria Poppy robot.
The humanoid Inria Poppy robot offers an open platform capable of providing an unifying thread for the different subjects covered during the 3-years of the Bachelor training: mechanics, manufacturing (3D printing), electrical, mecha-tronics, computer sciences, design.
-
Poppy entre dans la danse (Poppy enters the dance)
The project "Poppy enters the dance" (Canope 33) took place for the second year. It uses the humanoid robot Poppy. This robot is able to move and experience the dance. The purpose of this project is to allow children to understand the interactions between science and choreography, to play with the random and programmable, to experience movement in dialogue with the machine. At the beginning of the project they attended two days of training on the humanoid robot (Inria - Poppy Education). During the project, they met the choreographer Eric Minh Cuong Castaing and the engineer Segonds Theo (Inria - Poppy Education).
You can see a description and an overview of the project here:
-
The Academic Delegation for Digital Educational is in charge of supporting the development of digital uses for pedagogy. It implements the educational digital policy of the academy in partnership with local authorities. She accompanies institutions daily, encourages innovations and participates in their dissemination.
-
RoboCupJunior OnStage invites teams to develop a creative stage performance using autonomous robots that they have designed, built and programmed. The objective is to create a robotic performance between 1 to 2 minutes that uses technology to engage an audience. The challenge is intended to be open-ended. This includes a whole range of possible performances, for example dance, storytelling, theatre or an art installation. The performance may involve music but this is optional. Teams are encouraged to be as creative, innovative and entertaining, in both the design of the robots and in the design of the overall performance.
IniRobot: Educational Robotics in Primary Schools
Participants : Didier Roy [correspondant] , Pierre-Yves Oudeyer.
Reminder : IniRobot (a project done in collaboration with EPFL/Mobsya) aims to create, evaluate and disseminate a pedagogical kit which uses Thymio robot, an open-source and low cost robot, for teaching computer science and robotics.
IniRobot Project aims to produce and diffuse a pedagogical kit for teachers and animators, to help them and to train them directly or by the way of external structures. The aim of the kit is to initiate children to computer science and robotics. The kit provides a micro-world for learning, and takes an inquiry-based educational approach, where kids are led to construct their understanding through practicing an active investigation methodology within teams. See https://dm1r.inria.fr/c/kits-pedagogiques/inirobot or http://www.inirobot.fr.
Deployment: After 4 years of activity, IniRobot is used by more than 3000 adults, 30 000 children in France. Inirobot is also used in higher education, for example in Master 2 "Neurosciences, human and animal cognition" at the Paul Sabatier University in Toulouse. Inirobot is additionally used to train the management and elected officials of the Bordeaux metropolitan area (20 people). The digital mediators of the 8 Inria centers are trained to Inirobot and use it in their activities.
Partnership
The project continues to be carried out in main collaboration with the LSRO Laboratory from EPFL (Lausanne) and others collaborations such as the French National Education/Rectorat d'Aquitaine, the Canopé Educational Network, the ESPE (teacher's school) Aquitaine, the ESPE Martinique, the ESPE Poitiers and the National Directorate of Digital Education.
Created pedagogical documents and resources
-
The inirobot pedagogical kit [83]: This pedagogical booklet provides activities scenarized as missions to do. An updated version of the Inirobot pedagogical kit is available at: https://dm1r.inria.fr/uploads/default/original/1X/70037bdd5c290e48c7ec4cb4f26f0e426a4b4cf6.pdf. Another pedagogical booklet has been also created by three pedagogical advisers for primary school, with pedagogical instructions and aims, under our supervision. The new pedagogical kit,“Inirobot Scolaire, Langages et robotique”, which extends Inirobot to a full primary school approach is available at http://tice33.ac-bordeaux.fr/Ecolien/ASTEP/tabid/5953/language/fr-FR/Default.aspx
-
Inirobot website and forum: https://dm1r.inria.fr/c/kits-pedagogiques/inirobot or http://www.inirobot.fr On this website, teachers, animators and general public can download documents, exchange about their use of inirobot's kit.
Scientific mediation
Inirobot is very popular and often presented in events (conferences, workshops, ...) by us and others.
Spread of Inirobot activities
Inirobot activities are used by several projects: Dossier 123 codez from Main à la Pâte Fundation, Classcode project, ...
MOOC Thymio
The MOOC Thymio, released in october 2018, in collaboration with Inria Learning Lab and EPFL (Lausanne, Switzerland), on FUN platform and edX EPFL Platform), use Inirobot activities to teach how to use Thymio robot in education.