

Section: New Software and Platforms
Platforms
Robot Vision Platform
Participants : François Chaumette, Fabien Spindler [contact] .
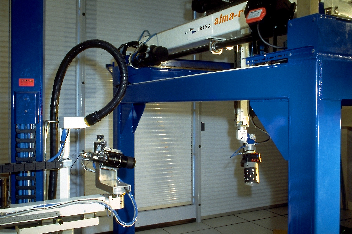
We exploit two industrial robotic systems built by Afma Robots in the nineties to validate our researches in visual servoing and active vision. The first one is a 6 DoF Gantry robot, the other one is a 4 DoF cylindrical robot (see Fig. 2). These robots are equipped with cameras. The Gantry robot also allows embedding grippers on its end-effector.
Note that 3 papers [53], [78], [10] and 1 PhD Thesis [2] published by Rainbow in 2018 include results validated on this platform.
Mobile Robots
Participants : Marie Babel, Solenne Fortun, François Pasteau, Fabien Spindler [contact] .
For fast prototyping of algorithms in perception, control and autonomous navigation, the team uses a Pioneer 3DX from Adept (see Fig. 3.a). This platform is equipped with various sensors needed for autonomous navigation and sensor-based control.
Moreover, to validate our research in personally assisted living topic (see Section 7.4.3), we have three electric wheelchairs, one from Permobil, one from Sunrise and the last from YouQ (see Fig. 3.b). The control of the wheelchair is performed using a plug and play system between the joystick and the low level control of the wheelchair. Such a system lets us acquire the user intention through the joystick position and control the wheelchair by applying corrections to its motion. The wheelchairs have been fitted with cameras and ultrasound sensors to perform the required servoing for assisting handicapped people. This year we also bought a wheelchair haptic simulator to develop new human interaction strategies in an virtual reality environment (Fig. 3(c)).
Note that 4 papers exploiting the mobile robots were published this year [23], [60], [79], [80].
|



Medical Robotic Platform
Participants : Alexandre Krupa, Marc Pouliquen, Fabien Spindler [contact] .
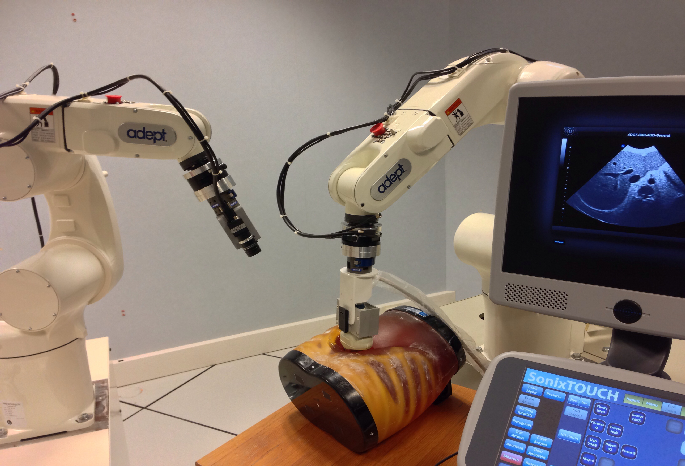
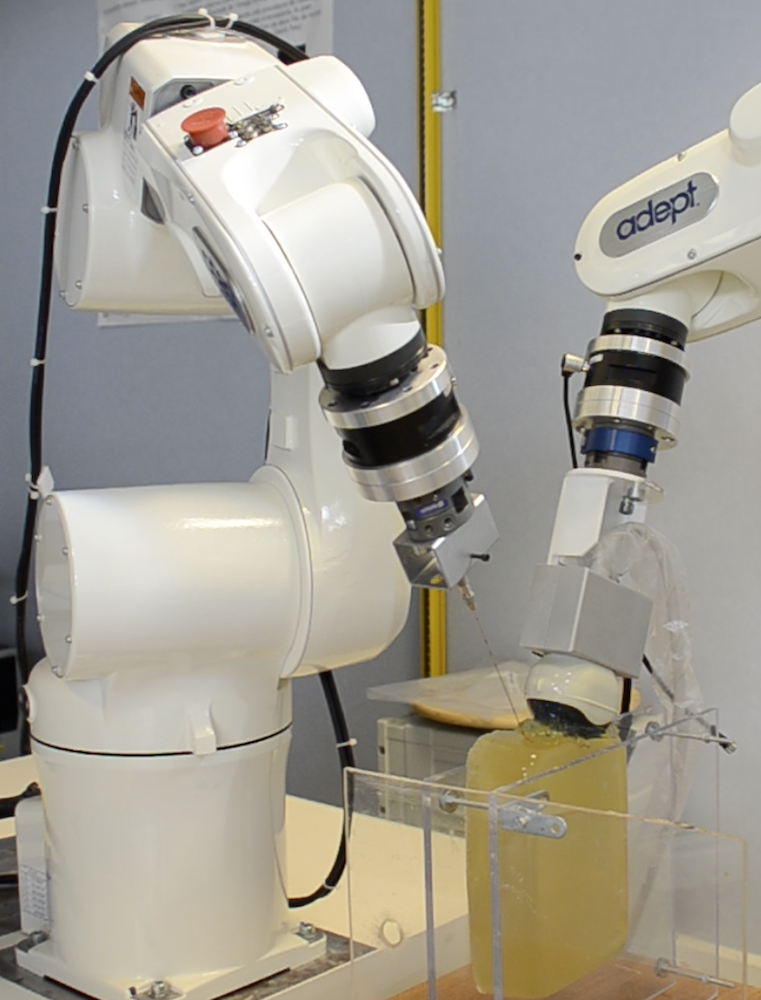
This platform is composed of two 6 DoF Adept Viper arms (see Fig. 4.a). Ultrasound probes connected either to a SonoSite 180 Plus or an Ultrasonix SonixTouch imaging system can be mounted on a force torque sensor attached to each robot end-effector. The haptic Virtuose 6D device (see Fig. 8.a) can also be used within this platform.
This testbed is of primary interest for researches and experiments concerning ultrasound visual servoing applied to probe positioning, soft tissue tracking, elastography or robotic needle insertion tasks (see Section 7.2.9).
This platform was used to obtain experimental results presented in 6 articles [18], [61], [12], [10], [36], [51] and in 2 PhD manuscripts [4], [5] published this year.
|
Advanced Manipulation Platform
Participants : François Chaumette, Claudio Pacchierotti, Paolo Robuffo Giordano, Fabien Spindler [contact] .
This new platform is composed by 2 Panda lightweight arms from Franka Emika equipped with torque sensors in all seven axes. An electric gripper, a camera or a soft hand from qbrobotics can be mounted on the robot end-effector (see Fig. 5) to validate our researches in coupling force and vision for controlling robot manipulators (see Section 7.2.13) and in shared control for remote manipulation (see Section 7.4.1). Other haptic devices (see Section 6.6.7) can also be coupled to this platform.
Note that 1 paper published this year include experimental results obtained with new platform [77].
|

Humanoid Robots
Participants : François Chaumette, Julien Pettré, Fabien Spindler [contact] .
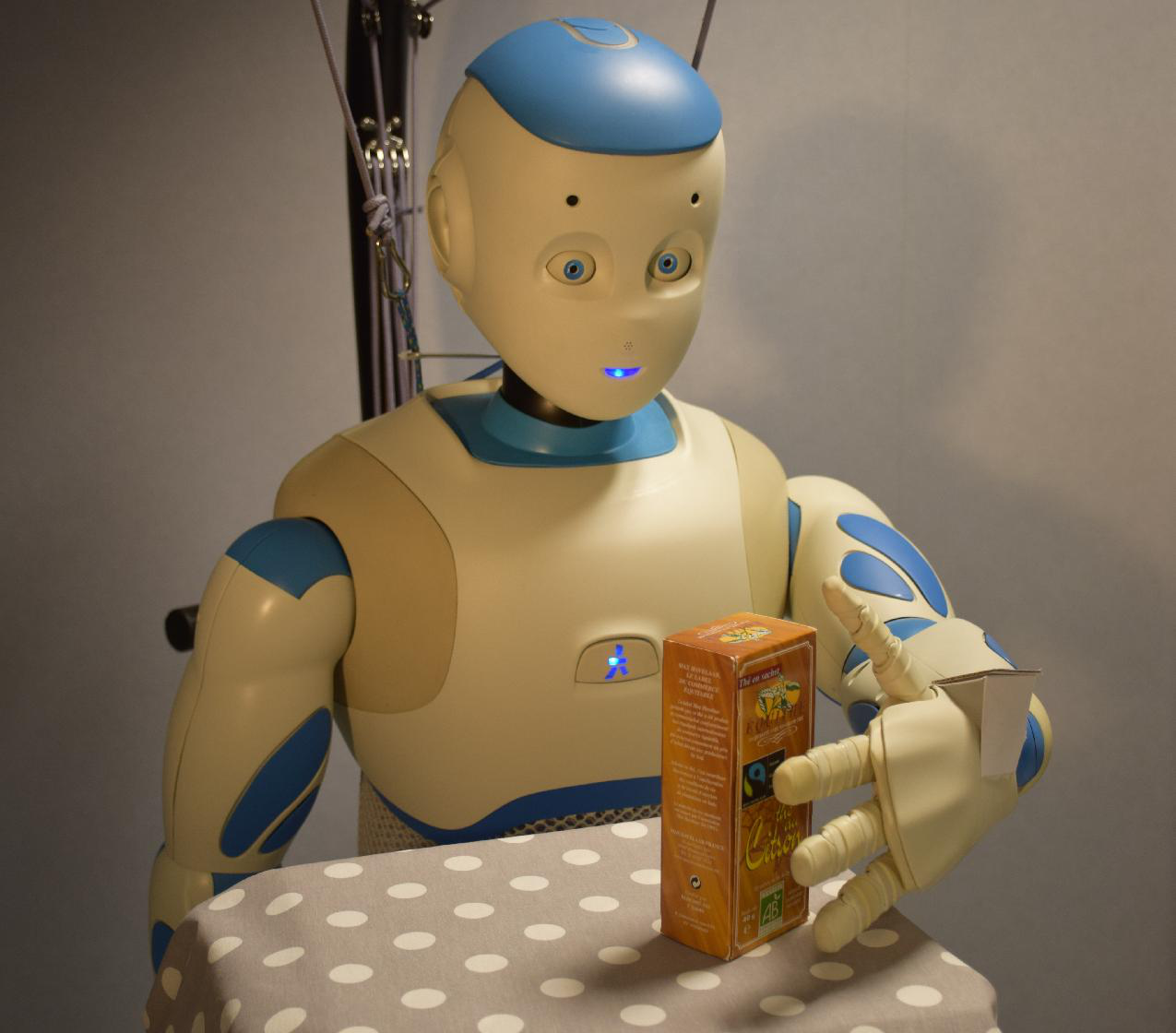
Romeo is a humanoid robot from SoftBank Robotics which is intended to be a genuine personal assistant and companion. Only the upper part of the body (trunk, arms, neck, head, eyes) is working. This research platform is used to validate our researches in visual servoing and visual tracking for object manipulation (see Fig. 6.a).
Pepper, another human-shaped robot designed by SoftBank Robotics to be a genuine day-to-day companion (see Fig. 6.b) is also part of this platform. It has 17 DoF mounted on a wheeled holonomic base and a set of sensors (cameras, laser, ultrasound, inertial, microphone) that makes this platform interesting for robot-human interactions during locomotion (see Section 7.2.5).
Note that 2 papers published this year include experimental results obtained with this platform [24], [23].
|
||||||

Unmanned Aerial Vehicles (UAVs)
Participants : Pol Mordel, Paolo Robuffo Giordano, Fabien Spindler [contact] .
From 2014, Rainbow also started some activities involving perception and control for single and multiple quadrotor UAVs, especially thanks to the ANR project “SenseFly” (see Section 9.2.1). To this end, we purchased four quadrotors from Mikrokopter Gmbh, Germany (see Fig. 7.a), and one quadrotor from 3DRobotics, USA (see Fig. 7.b). The Mikrokopter quadrotors have been heavily customized by: reprogramming from scratch the low-level attitude controller onboard the microcontroller of the quadrotors, equipping each quadrotor with a NVIDIA Jetson TX2 board running Linux Ubuntu and the TeleKyb-3 software based on genom3 framework developed at LAAS in Toulouse (the middleware used for managing the experiment flows and the communication among the UAVs and the base station), and purchasing the Flea Color USB3 cameras together with the gimbal needed to mount them on the UAVs. The quadrotor group is used as robotic platforms for testing a number of single and multiple flight control schemes with a special attention on the use of onboard vision as main sensory modality.
This year 7 papers [33], [34], [65], [67], [72], [17], [71] and 1 PhD Thesis [7] contain experimental results obtained with this platform.
|


Haptics and Shared Control Platform
Participants : Claudio Pacchierotti, Paolo Robuffo Giordano, Fabien Spindler [contact] .
Various haptic devices are used to validate our research in shared control. We have a Virtuose 6D device from Haption (see Fig. 8.a). This device is used as master device in many of our shared control activities (see Sections 9.3.1.3, 7.2.10, and 7.3.1). It could also be coupled to the Haption haptic glove in loan from the University of Birmingham. An Omega 6 (see Fig. 8.b) from Force Dimension, devices in loan from Ultrahaptics as well as a soft hand from qbrobotics complete this platform that could be coupled to the other robotic platforms.
This platform was used to obtain experimental results presented in 2 articles [51], [36] and in 1 PhD manuscript [5] published this year.

