

Section: New Results
Advanced Sensor-Based Control
Model Predictive Control for Visual Servoing of a UAV
Participants : Bryan Penin, François Chaumette, Paolo Robuffo Giordano.
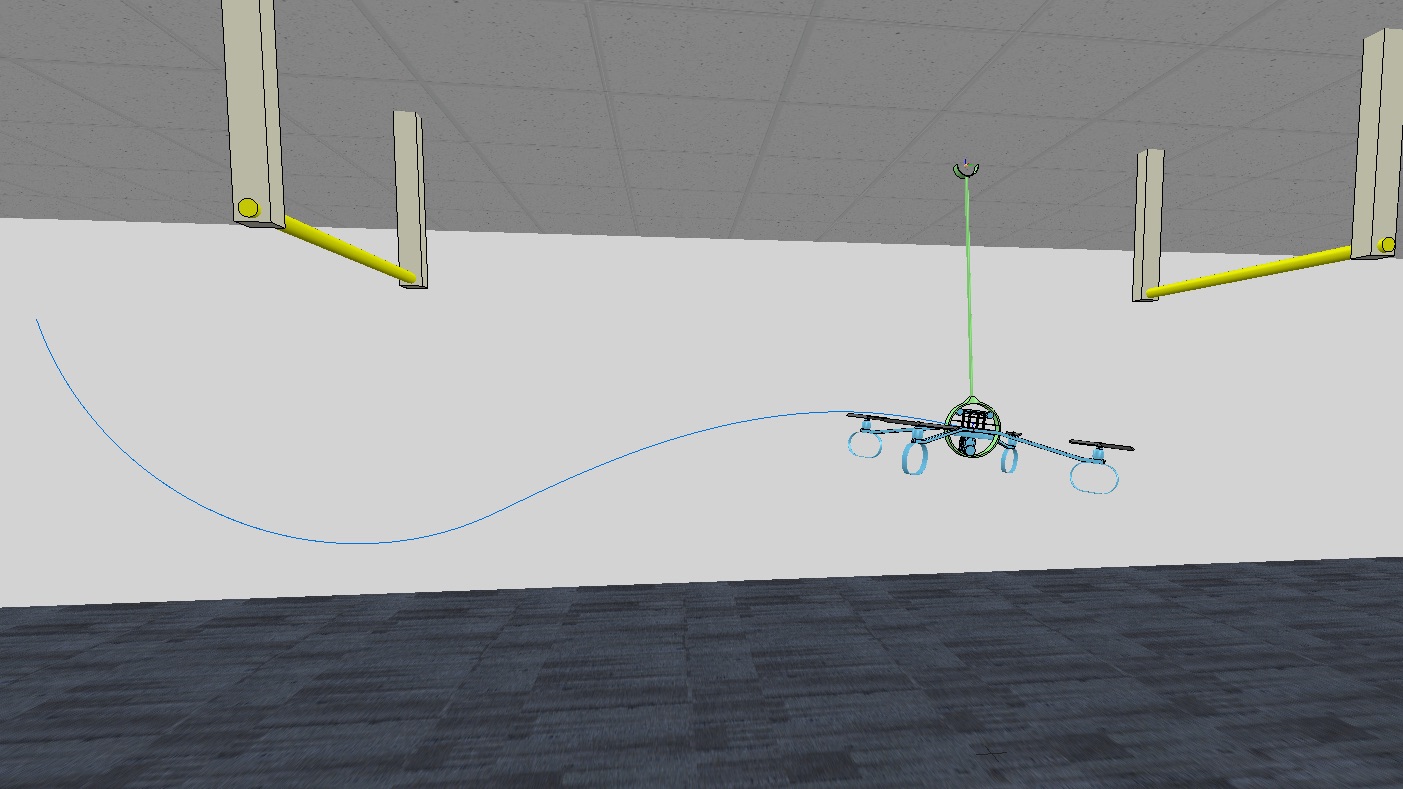
Visual servoing is a well-known class of techniques meant to control the pose of a robot from visual input by considering an error function directly defined in the image (sensor) space. These techniques are particularly appealing since they do not require, in general, a full state reconstruction, thus granting more robustness and lower computational loads. However, because of the quadrotor underactuation and inherent sensor limitations (mainly limited camera field of view), extending the classical visual servoing framework to the quadrotor flight control is not straightforward. For instance, for realizing a horizontal displacement the quadrotor needs to tilt in the desired direction. This tilting, however, will cause any downlooking camera to point in the opposite direction with, e.g., possible loss of feature tracking because of the limited camera field of view.
In order to cope with these difficulties and achieve a high-performance visual servoing of quadrotor UAVs, we have developed a series of online trajectory re-planning (MPC-like) schemes for explicitly dealing with this kind of constraints during flight. In particular, in [33], the problem of aggressive flight when tracking a target has been considered, with the additional (and complex) constraint of avoiding occlusions w.r.t. obstacles in the scene. A suitable optimization framework has been devised to be solved online during flight for continuously replanning the future UAV trajectory subject to the mentioned sensing constraints as well as actuation constraints. An experimental validation with the quadrotor UAVs available in the team has also been provided. In [34], we have instead considered the problem of planning a trajectory from a start to a goal location for a UAV equipped with an onboard camera, by assuming that measurements of environment landmarks (needed to recover the UAV state from visual input) may be intermittent due to occlusions by obstacles. The goal is then to plan a trajectory that can minimize the negative effects of “missing measurements” by keeping the state uncertainty limited despite the temporary loss of measurements. This planning problems has been solved by exploiting a bi-directional RRT algorithm for joining the start and goal locations, and an experimental validation has also been performed.
UAVs in Physical Interaction with the Environment
Participants : Quentin Delamare, Paolo Robuffo Giordano.
Most research in UAVs deals with either contact-free cases (the UAVs must avoid any contact with the environment), or “static” contact cases (the UAVs need to exert some forces on the environment in quasi- static conditions, reminiscent of what has been done with manipulator arms). Inspired by the vast literature on robot locomotion (from, e.g., the humanoid community), in this research topic we aim at exploiting the contact with the environment for helping a UAV maneuvering in the environment, in the same spirit in which we humans (and, supposedly, humanoid robots) use our legs and arms when navigating in cluttered environments for helping in keeping balance, or perform maneuvers that would be, otherwise, impossible. During last year we have considered in [17] the modeling, control and trajectory planning problem for a planar UAV equipped with a 1 DoF actuated arm capable of hooking at some pivots in the environment. This UAV (named MonkeyRotor) needs to “jump” from one pivot to the next one by exploiting the forces exchanged with the environment (the pivot) and its own actuation system (the propellers), see Fig. 9(a). We are currently finalizing a real prototype (Fig. 9(b)) for obtaining an experimental validation of the whole approach.
|

Trajectory Generation for Minimum Closed-Loop State Sensitivity
Participants : Quentin Delamare, Paolo Robuffo Giordano.
The goal of this research activity is to propose a new point of view in addressing the control of robots under parametric uncertainties: rather than striving to design a sophisticated controller with some robustness guarantees for a specific system, we propose to attain robustness (for any choice of the control action) by suitably shaping the reference motion trajectory so as to minimize the state sensitivity to parameter uncertainty of the resulting closed-loop system. In [70], we have explored this novel idea by showing how to properly define and evaluate the state sensitivity matrix and its gradient w.r.t. the desired trajectory parameters. This then allows setting up an optimization problem in which the desired trajectory is optimized so as to minimize a suitable norm of the state sensitivity. The machinery has been applied to two case studies involving a unicycle and a planar quadrotor with successful results (monte-carlo statistical analysis). We are currently considering extensions of this initial idea (e.g., by also considering a notion of input sensitivity), as well as an experimental validation of the approach.
Visual Servoing for Steering Simulation Agents
Participants : Axel Lopez Gandia, Eric Marchand, François Chaumette, Julien Pettré.
This research activity is dedicated to the simulation of human locomotion, and more especially to the simulation of the visuomotor loop that controls human locomotion in interaction with the static and moving obstacles of its environment. Our approach is based on the principles of visual servoing for robots. To simulate visual perception, an agent perceives its environment through a virtual camera located the position of its head. The visual input is processed by each agent in order to extract the relevant information for controlling its motion. In particular, the optical flow is computed to give the agent access to the relative motion of visible objects around it. Some features of the optical flow are finally extracted to estimate the risk of collision with obstacle. We have established the mathematical relations between those visual features and the agent's self motion. Therefore, when necessary, the agent motion is controlled and adjusted so as to cancel the visual features indicating a risk of future collision. We are now in the process of evaluating our motion control technique and exploring relevant applications, as well as preparing a publication summarizing this work.
Study of human locomotion to improve robot navigation
Participants : Florian Berton, Julien Bruneau, Julien Pettré.
This research activity is dedicated to the study of human gaze behaviour during locomotion. This activity is directly linked to the previous one on simulation, as human locomotion study results will serve as an input for the design of novel models for simulation. In this activity, we are first interested in collective pedestrian dynamics, i.e., how humans move in crowds, how they interact locally and how this results into the emergence of specific patterns at larger scales [52]. Virtual Reality is one main experimental tools in our approach, so as to control and reproduce easily situations we expose participants to, as well as to explore the nature of the visual cues human use to control their locomotion [22], [68]. We are also interested in the study of the activity of the gaze during locomotion that, in addition to the classical study of kinematics motion parameters, provides information on the nature of visual information acquired by humans to move, and the relative importance of visual elements in their surroundings [54], [26]. We directly exploit our experimental result to propose relevant navigation control techniques for robot to make them more adapted to move among humans [41], [58].
Direct Visual Servoing
Participants : Quentin Bateux, Eric Marchand.
We proposed a deep neural network-based method to perform high-precision, robust and real-time 6 DOF positioning tasks by visual servoing [53]. A convolutional neural network is fine-tuned to estimate the relative pose between the current and desired images and a pose-based visual servoing control law is considered to reach the desired pose. This approach efficiently and automatically creates a dataset used to train the network. We show that this enables the robust handling of various perturbations (occlusions and lighting variations). We then propose the training of a scene-agnostic network by providing both the desired and current images to a deep network for generating the camera motion. The method is validated on a 6 DOF robot.
Visual Servoing using Wavelet and Shearlet Transforms
Participants : Lesley-Ann Duflot, Alexandre Krupa.
We pursued our work on the elaboration of a direct visual servoing method in which the signal control inputs are the coefficients of a multiscale image representation [4]. In particular, we considered the use of multiscale image representations that are based on discrete wavelet and shearlet transforms. This year, we succeeded to derive an analytical formulation of the interaction matrix related to the wavelet and shearlet coefficients and experimentally demonstrated the performances of the proposed visual servoing approaches [18]. We also considered this control framework in a medical application which consists in automatically moving a biological sample carried by a parallel micro-robotic platform using Optical Coherence Tomography (OCT) as visual feedback. The objective of this application was to automatically retrieve the region of the sample that corresponds to an initial optical biopsy for diagnosis purpose. Experimental results demonstrated the efficiency of our approach that uses the wavelet coefficients of the OCT image as input of the control law to perform this task [61].
Visual Servoing from the Trifocal Tensor
Participants : Kaixiang Zhang, François Chaumette.
In visual servoing, three images are usually available at each iteration of the control loop: the very first one, the current one, and the desired one. That is why the trifocal tensor defined from this set of images is a potential candidate for providing visual features to be used as inputs of the control scheme. We have first modeled the interaction matrix related to the components of the trifocal tensor. We have then designed a set of reduced visual features with good decoupling properties, from which a thorough Lyapunov-based stability analysis has been developed [78].
3D Steering of Flexible Needle by Ultrasound Visual Servoing
Participants : Jason Chevrie, Marie Babel, Alexandre Krupa.
Needle insertion procedures under ultrasound guidance are commonly used for diagnosis and therapy. However, it is often critical to accurately reach a targeted region due to the deflection of the flexible needle and the presence of intra-operative tissue motions. Therefore this year we improved our robotic framework dedicated to 3D steering of flexible needle that is based on ultrasound visual servoing. We developed a new control approach that both steers the flexible needle toward a desired target and compensates the tissue self-motion during the needle insertion. In our approach, the target to be reached by the needle is tracked in 2D ultrasound images and the needle tip position and orientation are measured by an electromagnetic tracker. Tissue motion compensation is performed using force feedback to reduce targeting error and forces applied to the tissue. The method also uses a mechanics-based interaction model that is updated online to provide the current shape of the deformable needle. In addition, a novel control law using task functions was proposed to fuse motion compensation, needle steering via manipulation of its base and steering of the needle tip in order to reach the target. Validation of the tracking and steering algorithms were performed in gelatin phantom and bovine liver on which periodical perturbation motions (magnitude of 15 mm) were applied to simulate physiological motions. Experimental results demonstrated that our approach can reach a moving target with an average targeting error of 1.2 mm and 2.5 mm in resp. gelatin and liver, which is accurate enough for common needle insertion procedures [12].
Robotic Assistance for Ultrasound Elastography by Visual Servoing, Force Control and Teleoperation
Participants : Pedro Alfonso Patlan Rosales, Alexandre Krupa.
Ultrasound elastography is an image modality that unveils elastic parameters of a tissue, which are commonly related with certain pathologies. It is performed by applying continuous stress variation on the tissue in order to estimate a strain map from successive ultrasound images. Usually, this stress variation is performed manually by the user through the manipulation of an ultrasound probe and it results therefore in an user-dependent quality of the strain map. To improve the ultrasound elastography imaging and provide quantitative measurements, we developed an assistant robotic palpation system that automatically applies the motion to a 2D or 3D ultrasound probe that is needed to generate in real-time the elastography images during teleoperation [5]. This year, we have extended our robotic framework by developing a method that provides to the user the capability to physically feel the stiffness of the observed tissue of interest via a haptic device. This work has been submitted to the ICRA 2019 conference.
Deformation Servoing of Soft Objects
Participant : Alexandre Krupa.
This year, we started a new research activity whose objective is to provide robotic control approaches that improve the dexterity of robots interacting with deformable objects. The goal is to control one or several robots interacting with a soft object in such a way to reach a desired configuration of object deformation. Nowadays, most of the existing deformation control methods require accurate models of the object and/or environment in order to perform such tasks. Contrarily to these methods, we want to propose model-free methods that rely only on visual observation provided by a RGB-D sensor to control the deformation of soft objects without a priori knowledge of their material mechanical parameters and without a priori knowledge of their environment. In a preliminary study, we compared the model-based method based on physics simulation (Finite Element Model) and the model-free method of the state of the art. We also developed a first approach based on visual servoing that uses in the robot control law an online estimation of the interaction matrix that links the variation of the object deformation to the velocity of the robot end-effector. These different approaches have been implemented in simulation and are currently tested on a robotic arm (Adept Viper 650) interacting with a soft object (sponge). The first results are encouraging since they showed that our model-free visual servoing approach based on online estimation of the interaction matrix provides similar results than the model-based approach based on physics simulation.
Multi-Robot Formation Control
Participants : Paolo Robuffo Giordano, Fabrizio Schiano.
Most multi-robot applications must rely on relative sensing among the robot pairs (rather than absolute/external sensing such as, e.g., GPS). For these systems, the concept of rigidity provides the correct framework for defining an appropriate sensing and communication topology architecture. In our previous works we have addressed the problem of coordinating a team of quadrotor UAVs equipped with onboard cameras from which one could extract “relative bearings” (unit vectors in 3D) w.r.t. the neighboring UAVs in visibility. This problem is known as bearing-based formation control and localization. In [71], we considered the localization problem for multi-robots (that is, the problem of reconstructing the relative poses from the available bearing measurements), by recasting it as a nonlinear observability problem: this rigorous analysis led us to introduce the notion of Dynamic Bearing Observability Matrix, which in a sense extends the classical Bearing Rigidity Matrix to explicitly account for the robot motion. It was then possible to show that the scale factor of the formation is, indeed, observable by processing the bearing measurements and (known) agent motion, a result confirmed experimentally by employing a EKF on a group of quadrotor UAVs. This and more results on bearing-based formation control and localization for quadrotor UAVs are summarized in [7].
Coupling Force and Vision for Controlling Robot Manipulators
Participants : François Chaumette, Paolo Robuffo Giordano, Alexander Oliva.
The goal of this recent activity is about coupling visual and force information for advanced manipulation tasks. To this end, we plan to exploit the recently acquired Panda robot (see Sect. 6.6.4), a state-of-the-art 7-dof manipulator arm with torque sensing in the joints, and the possibility to command torques at the joints or forces at the end-effector. Thanks to this new robot, we plan to study how to optimally combine the torque sensing and control strategies that have been developed over the years to also include in the loop the feedback from a vision sensor (a camera). In fact, the use of vision in torque-controlled robot is quite limited because of many issues, among which the difficulty of fusing low-rate images (about 30 Hz) with high-rate torque commands (about 1 kHz), the delays caused by any image processing and tracking algorithms, and the unavoidable occlusions that arise when the end-effector needs to approach an object to be grasped. Our aim is therefore to advance the state-of-the-art in the field of torque-controlled manipulator arms by also including in the loop in an explicit way the use of a vision sensor. We will probably rely on estimation strategies for coping with the different rates of the two sensing modalities, and to online trajectory replanning strategies for dealing with constraints of the system (e.g., limited fov of the camera, of the fact that visibility of the target object is lost when closing in for grasping).