

Section: New Results
Bayesian Perception
Participants : Christian Laugier, Lukas Rummelhard, Jean-Alix David, Jerome Lussereau, Thomas Genevois, Nicolas Turro [SED] , Rabbia Asghar, Mario Garzon.
Recognized as one of the core technologies developed within the team over the years (see related sections in previous activity report of Chroma, and previously e-Motion reports), the CMCDOT framework is a generic Bayesian Perception framework, designed to estimate a dense representation of dynamic environments and the associated risks of collision, by fusing and filtering multi-sensor data. This whole perception system has been developed, implemented and tested on embedded devices, incorporating over time new key modules. In 2019, this framework, and the corresponding software, has continued to be the core of many important industrial partnerships and academic contributions, and to be the subject of important developments, both in terms of research and engineering. Some of those recent evolutions are detailed below.
In 2019, the new results have been presented in several invited talks given in some of the major international conferences of the domain [30], [28], [26], [29], [27].
Conditional Monte Carlo Dense Occupancy Tracker (CMCDOT) Framework
Participants : Lukas Rummelhard, Jerome Lussereau, Jean-Alix David, Thomas Genevois, Christian Laugier, Nicolas Turro [SED] .
Important developments in the CMCDOT (Fig. 5), in terms of calculation methods and fundamental equations, were introduced and tested. These developments are currently being patented, and will then be used for academic publications. These changes lead to a much higher update frequency, greater flexibility in the management of transitions between states (and therefore a better system reactivity), as well as to the management of a high variability in sensor frequencies (for each sensor over time, and in the set of sensors). The changes include:
-
Grid fusion: a new fusion of occupancy grids, enhanced with “unknown” variables, has been developed and implemented. The role of unknown variables has also been enlarged. Currently being patented, it should be the subject of an upcoming paper.
-
Ground Estimator: a new method of occupancy grid generation, more accurately taking into account the height of each laser beam, has been developed. Currently being patented, it should be the subject of an upcoming paper.
-
Software optimization: the whole CMCDOT framework has been developed on GPUs (implementations in C++/Cuda). An important focus of the engineering has always been, and continued to be in 2019, on the optimization of the software and methods to be embedded on low energy consumption embedded boards (Nvidia Jetson TX1, TX2, AGX Xavier).

Multimodal Bayesian perception
Participants : Thomas Genevois, Christian Laugier.
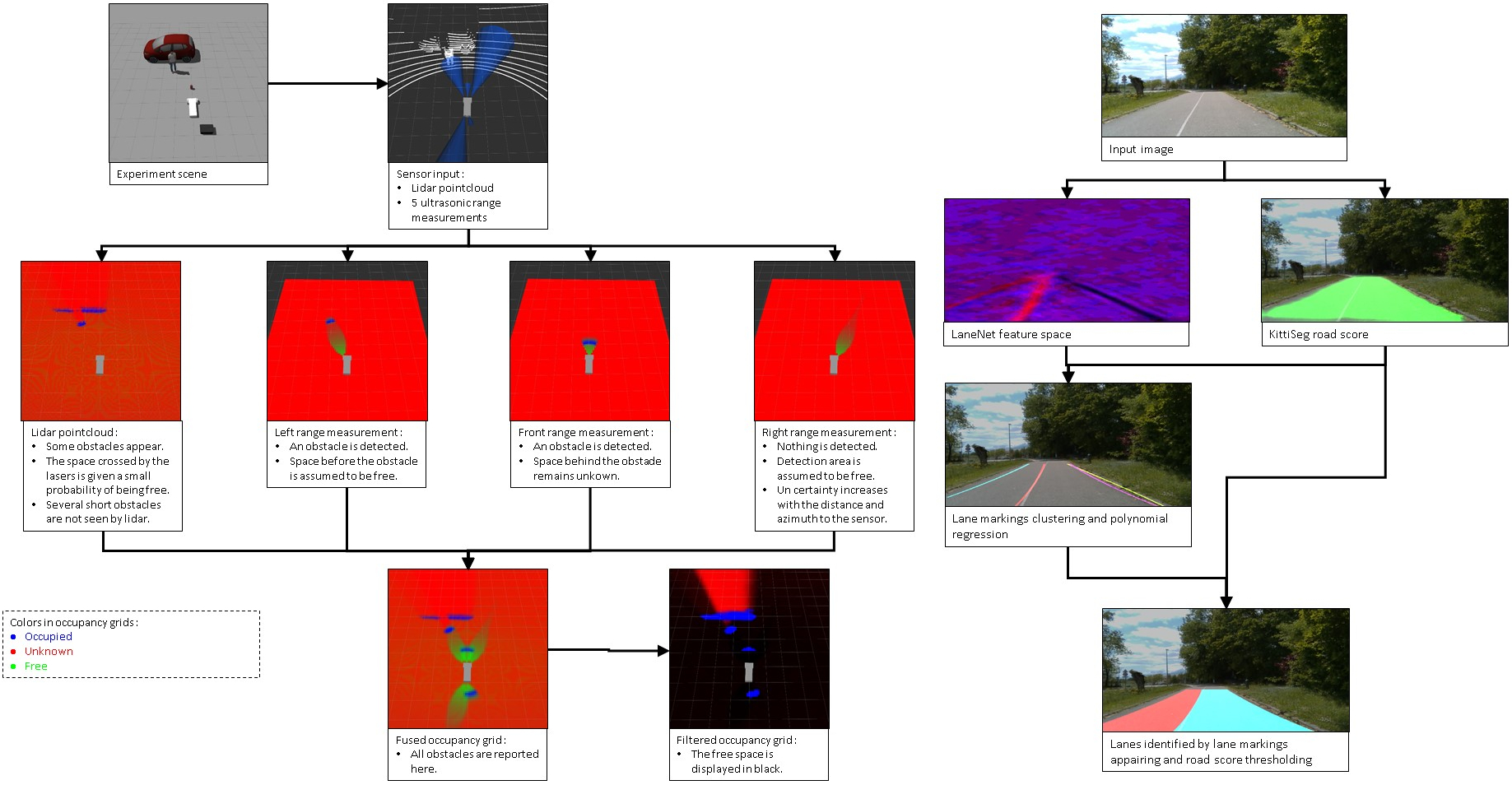
The objective is to extend the concept of Bayesian Perception to the fusion of multiple sensing modalities (including raw data provided by low cost sensors). In 2019, we have developed and implemented a Bayesian model dedicated to ultrasonic range sensors. For any given measurement provided by the sensor, the model computes the occupancy probability in a 2 dimensional grid around the sensor. This computation takes into account the accuracy and the possibility to “miss” an object. Thanks to various parameters, this model has been applied to the sensors of our Renault Zoe demonstrator and to the low cost sensors of our light vehicle demonstrator (flycar).
Fig. 6.a shows an example, developed and implemented on our light vehicle demonstrator. In this example, the perception is relying on 1 lidar and 5 ultrasonic range sensors. An occupancy grid is generated for each sensor. Then they are fused in a single occupancy grid which is filtered using the CMCDOT approach.
|
Embedding deep learning for semantics
Participants : Thomas Genevois, Christian Laugier.
The objective is to improve embedded Bayesian Perception outputs in our experimental vehicle platforms (Renault Zoe and Flycar), by adding semantics obtained using RGB images and embedded deep learning approaches. In 2019, we have tested several networks for road scene semantic segmentation and implemented two of them in our vehicle platforms:
-
LaneNet is a network that provides lane markings detection in road scenarios [83]
-
KittiSeg is a network that performs the segmentation of roads [95]
Therefore, Kittiseg is used to identify the shape of the road within an RGB image and LaneNet is used to identify the lane markings that divide the road into lanes. Upon this, we have developed a post-processing technique based on filtering, clustering and regression (Fig. 6.b). This post-processing technique makes the whole system far more robust and allows to express the lanes in a simple way (polynomial curves in the vehicle's base frame).
Since the objective is to embed semantic segmentation tools on our vehicle platforms, an emphasis has been put on the related embedded constraints (in particular strong real time constraints and appropriate light hardware such as the NVIDIA Jetson TX2). However, the networks LaneNet and KittiSeg have not been optimized neither for real-time inference nor for inference on light hardware. This is why we had to propose an approach for adapting these networks to our strong embedded constraints. This approach relies on the following three main steps: Reducing the resolution of the input image, Removing all computations not needed at inference (some parts of the networks are only needed in the learning phase), Adapting the network's shape to the hardware.
These optimization steps have been followed for KittiSeg and LaneNet networks. The improvement is obvious. Namely, for the network LaneNet the initial inference needed 334 operations while, after optimization, it needs only 10 operations. The inference initially runs at 0.3Hz on our board NVIDIA Jetson TX2 while, after optimization, it runs at 10Hz. Also the memory needed for inference is divided by two due to the optimization.
Online map-relative localization
Participants : Rabbia Asghar, Mario Garzon, Jerome Lussereau, Christian Laugier.
|

Localization is one of the key components of the system architecture of autonomous driving and Advanced Driver Assistance Systems (ADAS). Accurate localization is crucial to reliable vehicle navigation and acts as a prerequisite for the planning and control of autonomous vehicles. Offline digital maps are readily available especially in urban scenarios and they play an important role in the field of autonomous vehicles and ADAS.
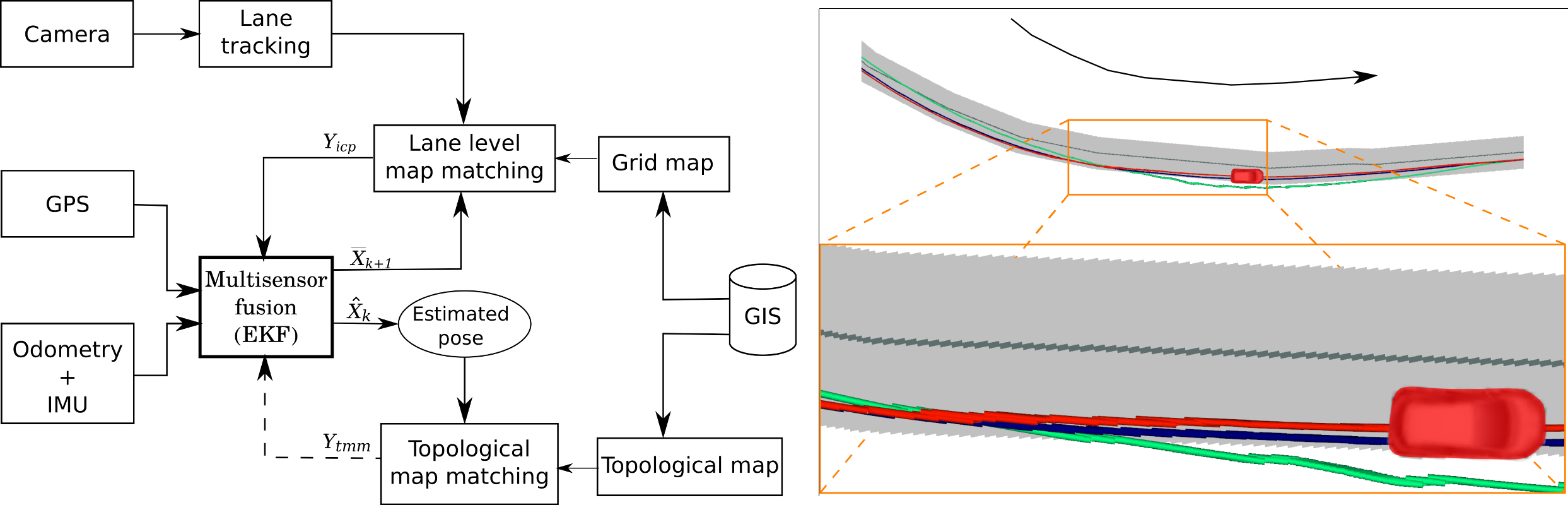
In this framework, we have developed a novel approach for online vehicle localization in a digital map. Two distinct map matching algorithms are proposed:
-
Iterative Closest Point (ICP) based lane level map matching (Ll.MM) is performed with visual lane tracker and grid map.
-
Decision-rule (DR) based approach is used to perform topological map matching (T. MM).
Results of both map matching algorithms are fused together with GPS and dead reckoning using Extended Kalman Filter to estimate the vehicle's pose relative to the map (see Fig. 7). The approach has been validated on real life conditions on a road-equipped vehicle using a readily available, open source map. Detailed analysis of the experimental results show improved localization using the two aforementioned map matching algorithms (see [50] for more details).
This research work has been carried out in the scope of Project Tornado. A paper on this work was submitted to ICRA2020 and is awaiting review.
System Validation using Simulation and Formal Methods
Participants : Alessandro Renzaglia, Anshul Paigwar, Mathieu Barbier, Philippe Ledent [Chroma/Convecs] , Radu Mateescu [Convecs] , Christian Laugier, Eduard Baranov [Tamis] , Axel Legay [Tamis] .
Since 2017, we are working on novel approaches, tools and experimental methodologies with the objective of validating probabilistic perception-based algorithms in the context of autonomous driving. To achieve this goal, a first approach based on Statistical Model Checking (SMC) has been mainly studied in the scope of the European project Enable-S3 and in collaboration with the Inria team Tamis. In this work, we studied the behavior of specifically defined Key Performance Indicators (KPIs), expressed as temporal properties depending on a set of identified metrics, during a large number of simulations via a statistical model checker. As a result, we obtained an evaluation of the probability for the system to meet the KPIs. In particular, we show how this method can be applied to two different subsystems of an autonomous vehicle: a perception system and a decision-making approach for intersection crossing [31]. A more detailed description of the validation scheme for the decision-making approach has been also presented in [49]. This work has been developed in the framework of M. Barbier's PhD thesis, which has been defended in December 2019 [11]. In parallel, in [38], we also proposed a methodology based on a combination of simulation, formal verification, and statistical analysis to validate the collision-risk assessment generated by the Conditional Monte Carlo Dense Occupancy Tracker (CMCDOT), a probabilistic perception system developed in the team. This second work is in collaboration with the Inria team Convecs.
In both cases, the validation methodology relies on the simulation of realistic scenarios generated by using the CARLA simulator (http://carla.org/). CARLA simulation environment consists of complex urban layouts, buildings and vehicles rendered in high quality, allowing for a realistic representation of real-world scenarios. The ego-vehicle and its sensors, as well as other moving vehicles can be so configured in the simulation to match with the actual system. In order to be able to efficiently generate a large number of execution traces, we have perfected a parameter-based approach which streamlines the process through which the dimensions and initial position and velocity of non-ego vehicles are specified.
We also collected several traces in real experiments by imitating the collision of the ego-vehicle (equipped Renault Zoe) with a pedestrian (by using a mannequin) and with another vehicle (by throwing a big ball). Since it is unfeasible to generate with real experiments a statistically significant number of traces, we focused our analysis on studying how close the simulation traces are to these real experiments by comparing analogous scenarios. These results have been recently submitted to ICRA and are currently under review (A. Paigwar, E. Baranov, A. Renzaglia, C. Laugier and A. Legay, "Probabilistic Collision Risk Estimation for Autonomous Driving: Validation via Statistical Model Checking", submitted to IEEE ICRA20.).
Industrial partners and technological transfer
Participants : Christian Laugier, Lukas Rummelhard, Jerome Lussereau, Jean-Alix David, Thomas Genevois.
In 2019, a significant amount of work has been done with the objective to transfer our Bayesian Perception technologies to industrial companies. In a first step, we have developed a new version of CMCDOT based on a clear split of ROS middle-ware code and of GroundEstimator/CMCDOT CUDA code. This allowed us to develop a new version of CMCDOT using the RTMAPS middleware for Toyota Motor Europe. It also allowed us to transfer the CMCDOT technology to some other industrial partners (confidential), in the scope of the project "Security of Autonomous Vehicle" of IRT Nanoelec. Within the IRT Nanoelec framework, we also developed a new "light urban autonomous vehicle" operating using an appropriate version of the CMCDOT and having the capability to navigate with low cost sensors. A first demo of the prototype of this light vehicle has been shown in December 2019, and a start-up project (named Starlink) is currently in incubation.
Autonomous vehicle demonstrations
Participants : Lukas Rummelhard, Jean-Alix David, Thomas Genevois, Jerome Lussereau, Christian Laugier.
In 2019, Chroma has participated to two main public demonstrations:

-
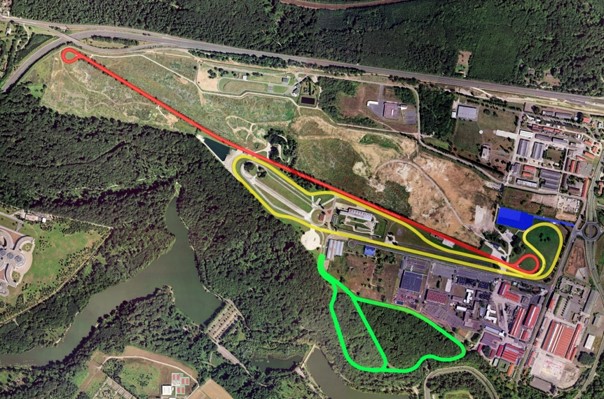
IEEE IV 2019 Conference (Versailles Satory, June 2019): A one day public demonstration of our Autonomous Vehicle Embedded Perception System has been done using our Renault Zoe platform. Fig. 8.a and 8.b show, respectively, the demonstration track (yellow track) and our booth & demonstration vehicle. During the day, we regularly drove people in our Zoe platform for demonstrating how the perception system was working in various situations.
-
FUI Tornado mid-project event (Rambouillet, September 2019): This one week event included public demonstrations and several open-road tests. During this week, we tested the technologies developed in the scope of the project and we made public and official (for persons from the French Ministries) demonstrations with our Renault Zoe vehicle.