Section: New Results
Situation Awareness & Decision-making for Autonomous Vehicles
Participants : Ozgur Erkent, Christian Wolf, Christian Laugier, Olivier Simonin, Mathieu Barbier, David Sierra-Gonzalez, Jilles Dibangoye, Mario Garzon, Anshul Paigwar, Manuel Alejandro Diaz-Zapata, Victor Romero-Cano [Universidad Autónoma de Occidente, Cali, Colombia] , Andrés E. Gómez H., Luiz Serafim-Guardini.
In this section, we include all the novel results in the domains of perception, motion prediction and decision-making for autonomous vehicles. In 2019, these results have also been presented in several invited talks given in some of the major international conferences of the domain [30], [28], [26], [29], [27].
End-to-End Learning of Semantic Grid Estimation Deep Neural Network with Occupancy Grids
Participants : Özgür Erkent, Christian Wolf, Christian Laugier.
Semantic grid is a spatial 2D map of the environment around an autonomous vehicle consisting of cells which represent the semantic information of the corresponding region such as car, road, vegetation, bikes, etc.. It consists of an integration of an occupancy grid, which computes the grid states with a Bayesian filter approach, and semantic segmentation information from monocular RGB images, which is obtained with a deep neural network. The network fuses the information and can be trained in an end-to-end manner. The output of the neural network is refined with a conditional random field [15]. The contributions of the study are:
-
An end-to-end trainable deep learning method to obtain the semantic grids by integrating the occupancy grids obtained by a Bayesian filter approach and the semantically segmented images by using the monocular RGB images of the environment.
-
Grid refinement with conditional random fields (CRFs) on the output of the deep network.
-
A comparison of the performances of three different semantic segmentation network architectures in the proposed end-to-end trainable setting.
|
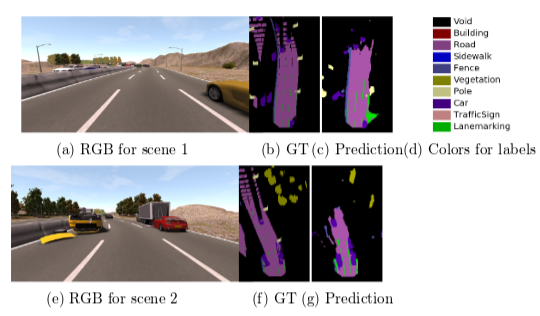
The proposed method is tested in various datasets (KITTI dataset, Inria-Chroma dataset and SYNTHIA) and different deep neural network architectures are compared (Fig. 9).
Attentional PointNet for 3D object detection in Point Cloud
Participants : Anshul Paigwar, Özgür Erkent, Christian Wolf, Christian Laugier.
|
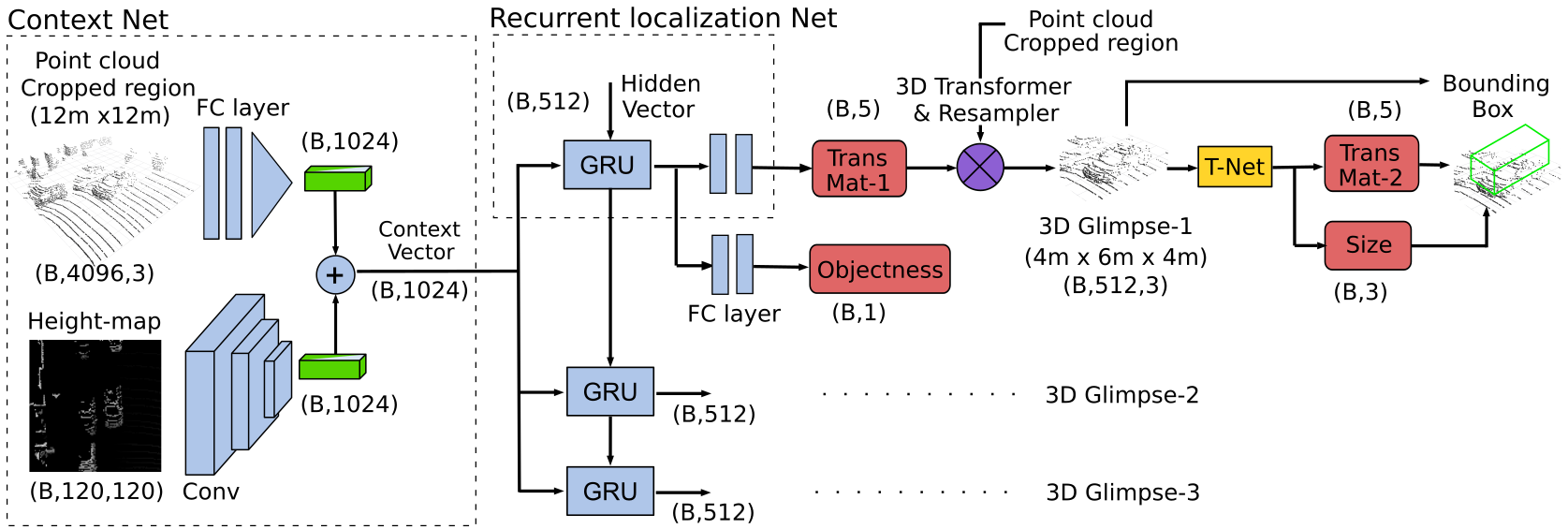
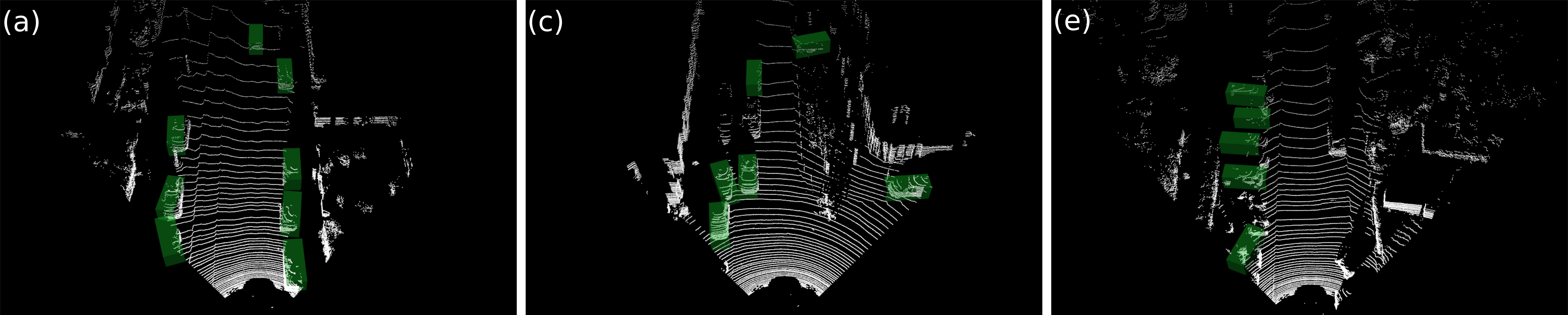
Accurate detection of objects in 3D point clouds is a central problem for autonomous navigation. Approaches like PointNet [87] that directly operate on sparse point data have shown good accuracy in the classification of single 3D objects. However, LiDAR sensors on Autonomous Vehicles generate a large scale point cloud. Real-time object detection in such a cluttered environment still remains a challenge. In this study, we propose Attentional PointNet, which is a novel end-to-end trainable deep architecture for object detection in point clouds (Fig. 10). We extend the theory of visual attention mechanisms to 3D point clouds and introduce a new recurrent 3D Localization Network module. Rather than processing the whole point cloud, the network learns where to look (finding regions of interest), which significantly reduces the number of points to be processed and inference time. Evaluation on KITTI [72] car detection benchmark shows that our Attentional PointNet achieves comparable results with the state-of-the-art LiDAR-based 3D detection methods in detection (Fig. 11) and speed.
|
This work has been published in CVPR 2019 - Workshop for Autonomous Driving, Long Beach, California, USA [39].
Panoptic Segmentation
Participants : Manuel Alejandro Diaz-Zapata, Victor Romero-Cano [Universidad Autónoma de Occidente, Cali, Colombia] , Özgür Erkent, Christian Laugier.
This work has been accomplished during the internship of Manuel Alejandro Diaz Zapata at Inria-Rhone Alpes under supervision of Ozgur Erkent, Victor Romero-Cano and Christian Laugier at Chroma Project Team. Manuel Alejandro Diaz Zapata was a student of Mechatronic Engineering at Universidad Autónoma de Occidente, Colombia during his internship [52].
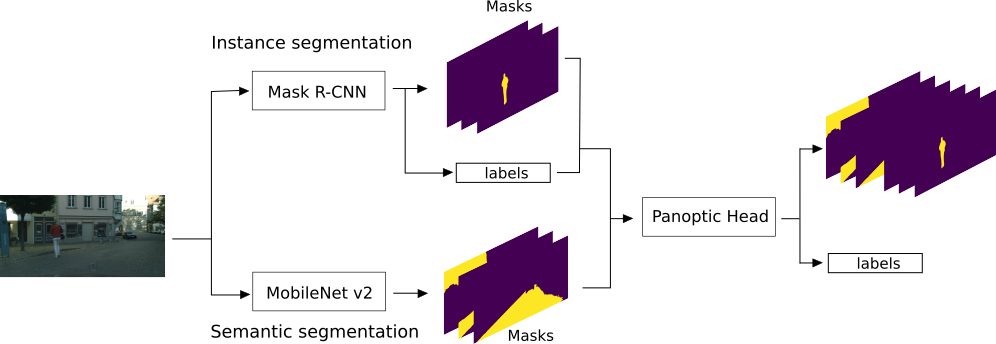
Semantic segmentation labels an image at the pixel level, where amorphous regions of similar texture or material such as grass, sky or road are given a label depending on the class. Instance segmentation focuses on countable objects such as people, cars or animals by delimiting them in the image using bounding boxes or a segmentation mask. To reduce the gap between the methods used to detect uncountable objects, and things or countable objects, panoptic segmentation has been proposed [75].
We propose a model consisting of three modules: the semantic segmentation module, the instance segmentation module and the panoptic head (Fig.12). Here the semantic segmentation is done by the MobileNetV2 [90] and the instance segmentation is done by Mask R-CNN [73]. The outputs of both networks are joint by the Panoptic Head. The results are provided on two different datasets.
Recognition of dynamic objects for risk assessment
Participants : Andrés E. Gómez H., Özgür Erkent, Christian Laugier.
The Conditional Monte Carlo Dense Occupancy Tracker (CMCDOT) framework has proved its accuracy in describing 2D spatial maps for the Zoe platform. However, this method nowadays cannot recognize the objects in the surrounding. Specifically, the identification of dynamical objects will let us consider different methodologies of risk assessment. This procedure can be possible, through the fusion of RGB and dynamical occupancy grids information.
In the fusion process development, we took into consideration the following steps: i) selection of a deep-learning approach, ii) development of the projective transformations and iii) joining the sub-results. In each step, we used real data from the Zoe platform. In the first step, the YoloV3 was the deep-learning approach chosen for its accuracy and time performance. In the second step, the projective transformations let us compute the representation of the dynamical points obtained from the occupancy grid plane (i.e., CMCDOT framework) in the image plane. Finally, in the third step, we compare the result obtained between the last two-step to identify the dynamic objects around the Zoe platform.
|
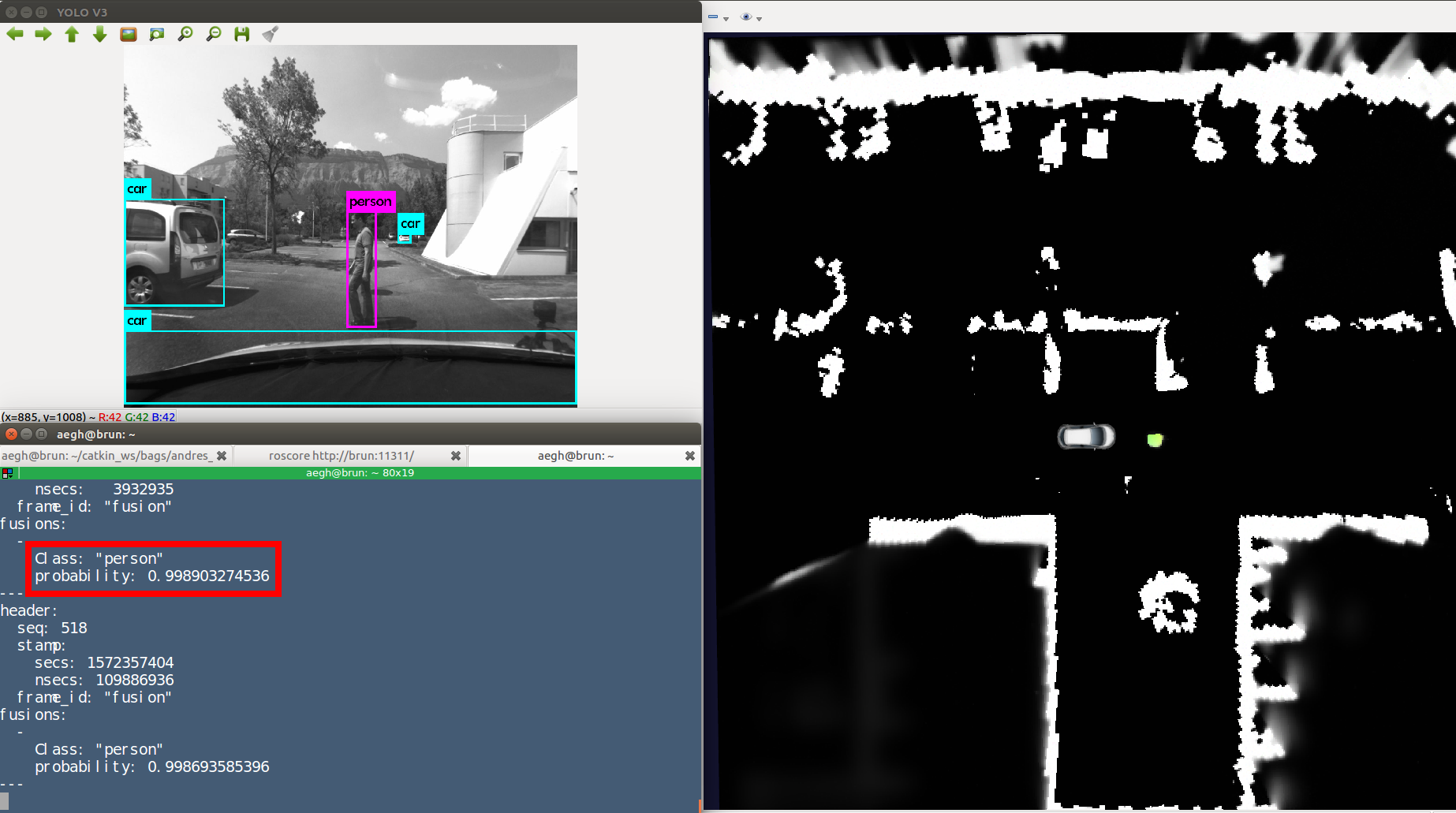
Figure 13 lets us observe the inputs needed for the fusion process and its result.
The work described in this section was done during 2019, inside the activities developed for the Star project. The future work in our project aims to consider the velocity and direction of the dynamic points to define and implement risk behavior functions.
Driving behavior assessment and anomaly detection for intelligent vehicles
Participants : Chule Yang [Nanyang Technological University] , Alessandro Renzaglia, Anshul Paigwar, Christian Laugier, Danwei Wang [Nanyang Technological University] .
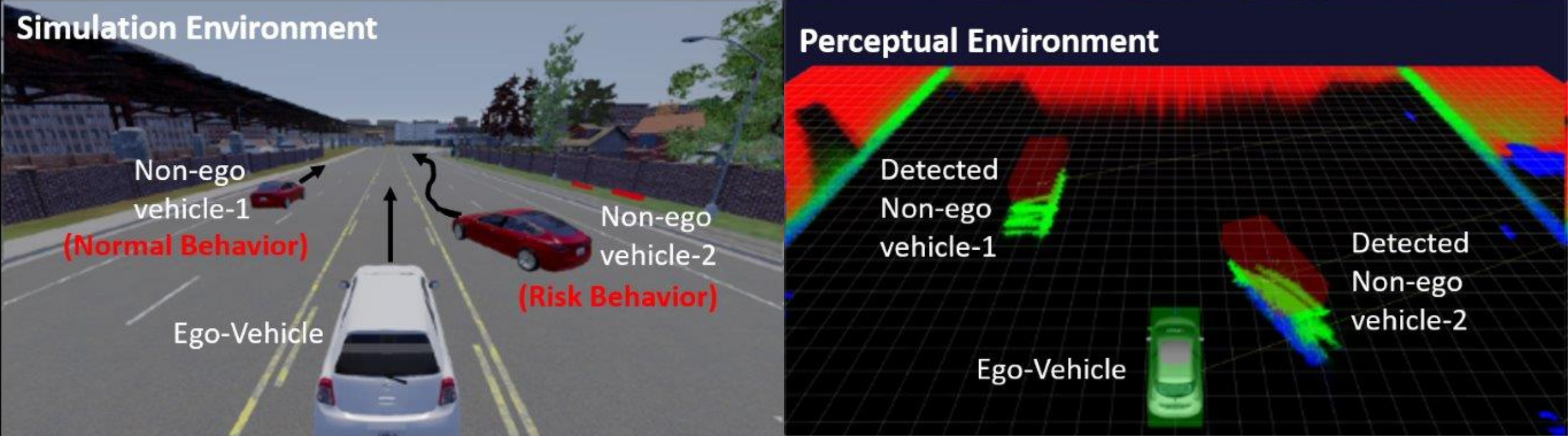
Ensuring safety of both traffic participants and passengers is an important challenge for rapidly growing autonomous vehicle technology. To this purpose, intelligent vehicles not only have to drive safe but must be able to safeguard themselves from other abnormally driving vehicles and avoid potential collisions [56]. Anomaly detection is one of the essential abilities in behavior analysis, which can be used to infer the moving intention of other vehicles and provide evidence for collision risk assessment. In this work, we propose a behavior analysis method based on Hidden Markov Model (HMM) to assess the driving behavior of vehicles on the road and detect anomalous moments. The algorithm uses the real-time velocity and position of the surrounding vehicles provided by the Conditional Monte Carlo Dense Occupancy Tracker (CMCDOT) [89] framework. The movement of each vehicle can be classified into several observation states, namely, Approaching, Braking, Lane Changing, and Lane Keeping. Finally, by chaining these observation states using a Markov model, the abnormality of driving behavior can be inferred into Normal, Attention, and Risk. We perform experiments using CARLA simulator environment to simulate abnormal driving behaviors as shown in Fig. 14, and we provide results showing the successful detection of abnormal situations.
This work has been published in IEEE CIS-RAM 2019, Bangkok [45].
|
Human-Like Decision-Making for Automated Driving in Highways
Participants : David Sierra-Gonzalez, Mario Garzon, Jilles Dibangoye, Christian Laugier.
Sharing the road with humans constitutes, along with the need for robust perception systems, one of the major challenges holding back the large-scale deployment of automated driving technology. The actions taken by human drivers are determined by a complex set of interdependent factors, which are very hard to model (e.g. intentions, perception, emotions). As a consequence, any prediction of human behavior will always be inherently uncertain, and becomes even more so as the prediction horizon increases. Fully automated vehicles are thus required to make navigation decisions based on the uncertain states and intentions of surrounding vehicles. Building upon previous work, where we showed how to estimate the states and maneuver intentions of surrounding drivers [91], we developed a decision-making system for automated vehicles in highway environments. The task is modeled as a Partially Observable Markov Decision Process and solved in an online fashion using Monte Carlo tree search. At each decision step, a search tree of beliefs is incrementally built and explored in order to find the current best action for the ego-vehicle. The beliefs represent the predicted state of the world as a response to the actions of the ego-vehicle and are updated using an interaction- and intention-aware probabilistic model. To estimate the long-term consequences of any action, we rely on a lightweight model-based prediction of the scene that assumes risk-averse behavior for all agents. We refer to the proposed decision-making approach as human-like, since it mimics the human abilities of anticipating the intentions of surrounding drivers and of considering the long-term consequences of their actions based on an approximate, common-sense, prediction of the scene. We evaluated the proposed approach in two different simulated navigational tasks: lane change planning and longitudinal control. The results obtained demonstrated the ability of the proposed approach to make foresighted decisions and to leverage the uncertain intention estimations of surrounding drivers.
This work was published in ITSC 2019 [44]. It constitutes the last contribution of the PhD dissertation of David Sierra González, which was defended in April 2019 [12].
Contextualized Emergency Trajectory Planning using severity curves
Participants : Luiz Serafim Guardini, Anne Spalanzani, Christian Laugier, Philippe Martinet.
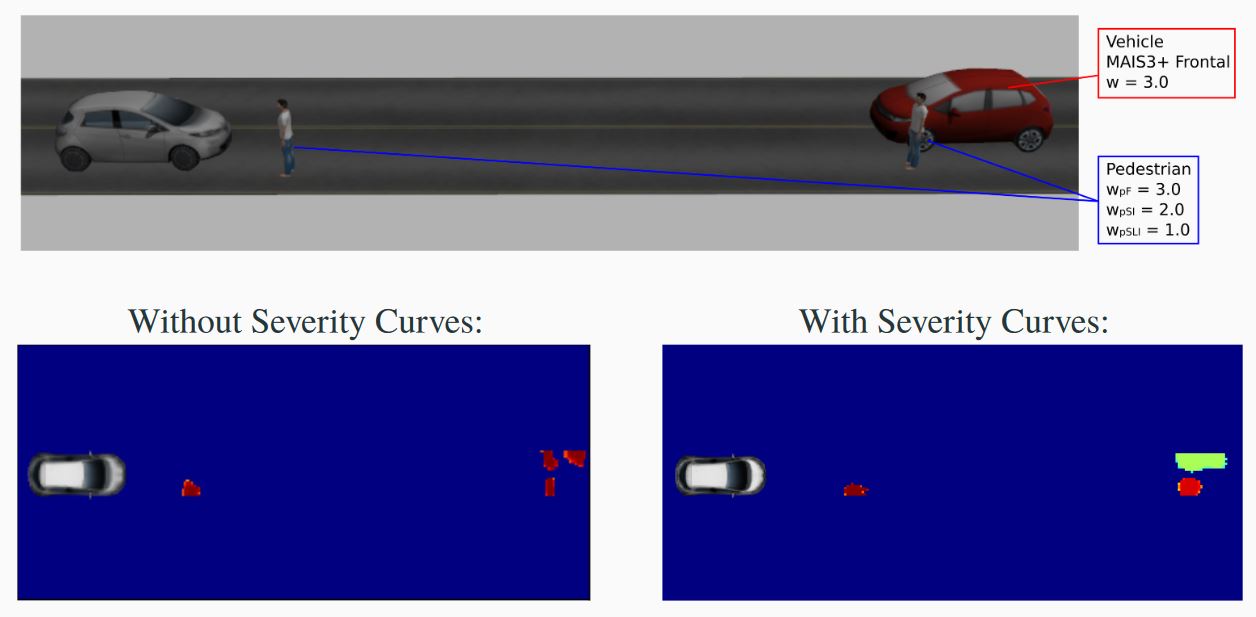
Perception and interpretation of the surroundings is essential for human drivers as well as for (semi-)autonomous vehicles navigation. To improve such interpretation, a lot of effort has been put in place, for example predicting the behavior of pedestrians and other drivers. Nevertheless, to date, cost maps still have considered simple contextualized objects (for instance, binary allowed/forbidden zones or a fixed weight to each type of object). In this work, the risk of injury issued by accidentology is employed to each class of object present in the scene. The scene is analyzed according to dynamic characteristics related to the Ego vehicle and enclosing objects. The aim is to have a better assessment of the surroundings by creating a navigation cost map and to get an improvement on the understanding of the collision severity in the scene. During the first year of his PhD, Luiz Serafim Gaurdini focused on the development of a probabilistic costmap that expresses the Probability of Collision with Injury Risk (PCIR) (see an example on Figure 15). On top of the information gathered by sensors, it includes the severity of injury in the event of a collision between ego and the objects in the scene. This cost map provides enhanced information to perform vehicle motion planning.
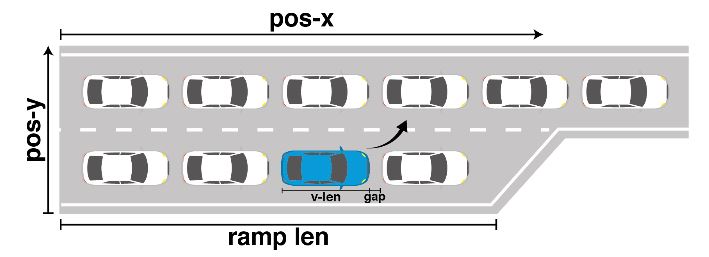
Game theoretic decision making for autonomous vehicles’ merge manoeuvre in high traffic scenarios
Participants : Mario Garzon, Anne Spalanzani.
The goal of this work is to provide a solution for a very challenging task: the merge manoeuvre in high traffic scenarios (see Figure 16). Unlike previous approaches, the proposed solution does not rely on vehicle-to-vehicle communication or any specific coordination, moreover, it is capable of anticipating both the actions of other players and their reactions to the autonomous vehicle’s movements. The game used is an iterative, multi-player level-k model,which uses cognitive hierarchy reasoning for decision making and has been proved to correctly model human decisions in uncertain situations. This model uses reinforcement learning to obtain a near-optimal policy, and since it is an iterative model, it is possible to define a goal state so that the policy tries to reach it. To test the decision making process, a kinematic simulation was implemented. The resulting policy was compared with a rule-based approach. The experiments show that the decision making system is capable of correctly performing the merge manoeuvre, by taking actions that require reactions of the other players to be successfully completed. This work was published in [48].