

Section: New Results
Learning robot high-level behaviors
Learning task-based motion planning
Participants : Christian Wolf, Jilles Dibangoye, Laetitia Matignon, Olivier Simonin, Edward Beeching.
|
Our goal is the automatic learning of robot navigation in complex environments based on specific tasks and from visual input. The robot automatically navigates in the environment in order to solve a specific problem, which can be posed explicitly and be encoded in the algorithm (e.g. find all occurences of a given object in the environment, or recognize the current activities of all the actors in this environment) or which can be given in an encoded form as additional input, like text. Addressing these problems requires competences in computer vision, machine learning and AI, and robotics (navigation and paths planning).
A critical part for solving these kind of problems involving autonomous agents is handling memory and planning. An example can be derived from biology, where an animal that is able to store and recall pertinent information about their environment is likely to exceed the performance of an animal whose behavior is purely reactive. Many control problems in partially observed 3D environments involve long term dependencies and planning. Solving these problems requires agents to learn several key capacities: spatial reasoning — to explore the environment in an efficient manner and to learn spatio-temporal regularities and affordances. The agent needs to discover relevant objects, store their positions for later use, their possible interactions and the eventual relationships between the objects and the task at hand. Semantic mapping is a key feature in these tasks. A second feature is discovering semantics from interactions — while solutions exist for semantic mapping and semantic SLAM [64], [94], a more interesting problem arises when the semantics of objects and their affordances are not supervised, but defined through the task and thus learned from reward.
We started this work in the end of 2017, following the arrival of C. Wolf and his 2 year delegation in the team between Sept 2017. to Sept. 2019, through combinations of reinforcement learning and deep learning. The underlying scientific challenge here is to automatically learn representations which allow the agent to solve multiple sub problems required for the task. In particular, the robot needs to learn a metric representation (a map) of its environment based from a sequence of ego-centric observations. Secondly, to solve the problem, it needs to create a representation which encodes the history of ego-centric observations which are relevant to the recognition problem. Both representations need to be connected, in order for the robot to learn to navigate to solve the problem. Learning these representations from limited information is a challenging goal. This is the subject of the PhD thesis of Edward Beeching, which started on October 2018.
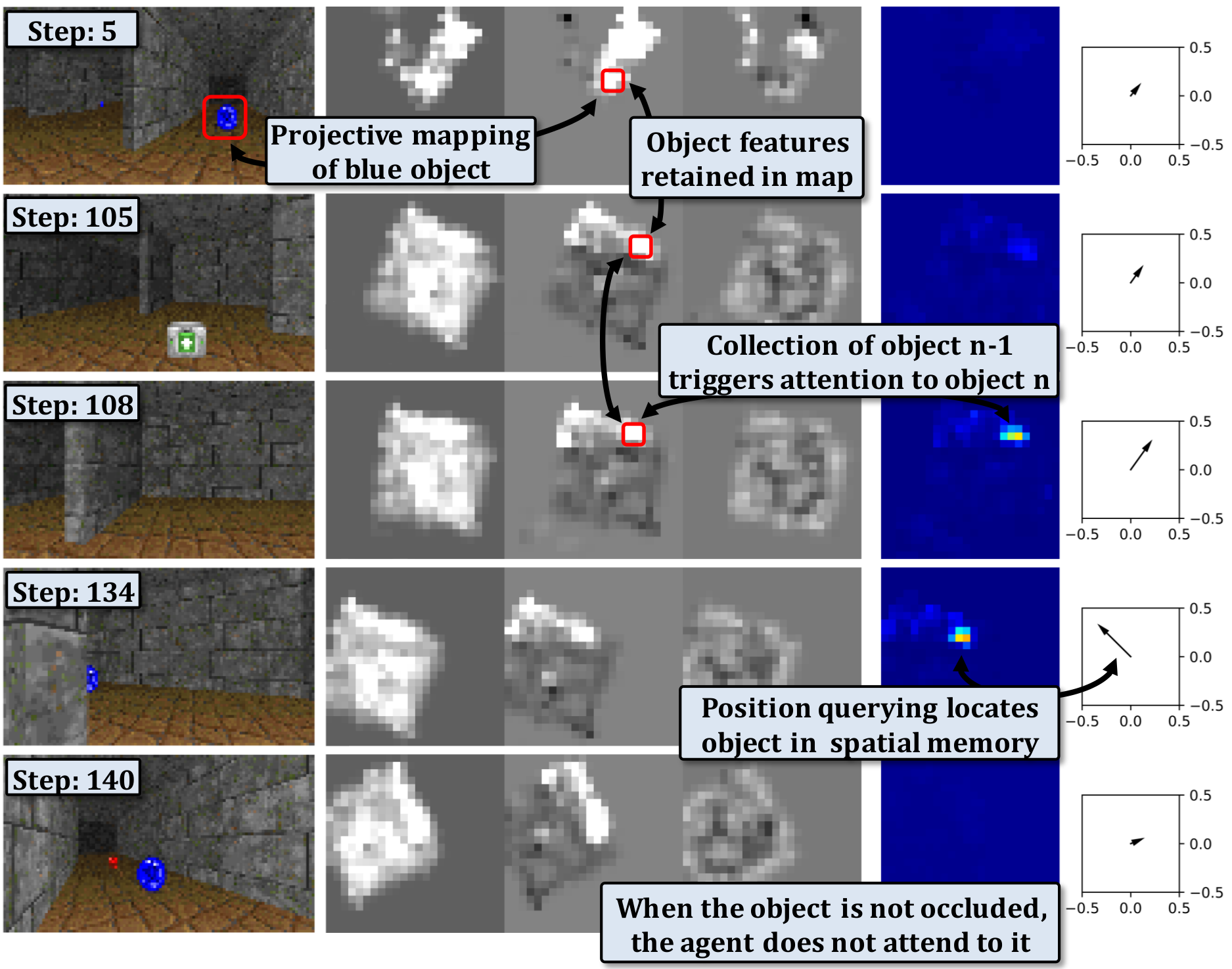
First work proposed a new 3D benchmark for Reinforcement learning, which requires high-level reasoning through the automatic discovery of object affordances [58]. Follow-up work proposed EgoMap, a spatially structured metric neural memory architecture integrating projective geometry in deep reinforcement learning, which we show to outperform classical recurrent baselines. In particular, we show that through visualizations that the agents learns to map relevant objects in its spatial memory without any supervision purely from reward (see Fig. 19). Ongoing work aims to propose a fully differentiable topological memory for Deep-RL.
Creating agents capable of high-level reasoning based on structured memory is main topic of the AI Chair "REMEMBER" obtained by C.Wolf in late 2019 and which involves O. Simonin and J. Dibangoye (Inria Chroma) as well as Laetitia Matignon (LIRIS/Univ Lyon 1). The chair is co-financed by ANR, Naver Labs Europe and INSA-Lyon.
Social robot : NAMO extension and RoboCup@home competition
Participants : Jacques Saraydaryan, Fabrice Jumel, Olivier Simonin, Benoit Renault, Laetitia Matignon, Christian Wolf.
Since 3 years, we investigate robot/humanoid navigation and complex tasks in populated environments such as homes :
|

-
In 2018 we started to study NAMO problems (Navigation Among Movable Obstacles). In his PhD work, Benoit Renault is extending NAMO to Social-NAMO by modeling obstacle hindrance in regards to space access. Defining new spatial cost functions, we extend NAMO algorithms with the ability to maintain area accesses (connectivity) for humans and robots [41]. We also developed a simulator of NAMO problems and algorithms, called S-NAMO-SIM.
-
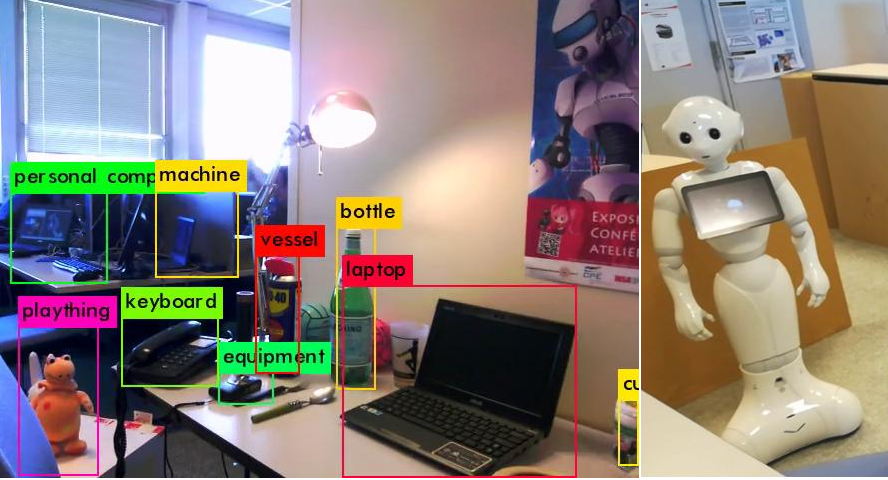
In the context of the RoboCup international competition, we created in 2017 the'LyonTech' team, gathering members from Chroma (INSA/CPE/UCBL). We investigated several issues to make humanoid robots able to evolve in a populated indoor environment : decision making and navigation (Fig. 20.a), human and object recognition based on deep learning techniques (Fig. 20.b) and human-robot interaction. In July 2018, we participated for the first time to the RoboCup and we reached the 5th place of the SSL league (Robocup@home with Pepper). In July 2019, we participated to the RoboCup organized in Sydney and we obtained the 3rd place of the SSL league. We also awarded the scientific Best Paper of the RoboCup conference [43].