Section: New Results
Motion-planning in dense pedestrian environments
We study new motion planning algorithms to allow robots/vehicles to navigate in human populated environment, and to predict human motions. Since 2016, we investigate several directions exploiting vision sensors : prediction of pedestrian behaviors in urban environments (extended GHMM), mapping of human flows (statistical learning), and learning task-based motion planning (RL+Deep-Learning). The works of year 2019 are presented below.
Urban Behavioral Modeling
Participants : Pavan Vasishta, Anne Spalanzani, Dominique Vaufreydaz.
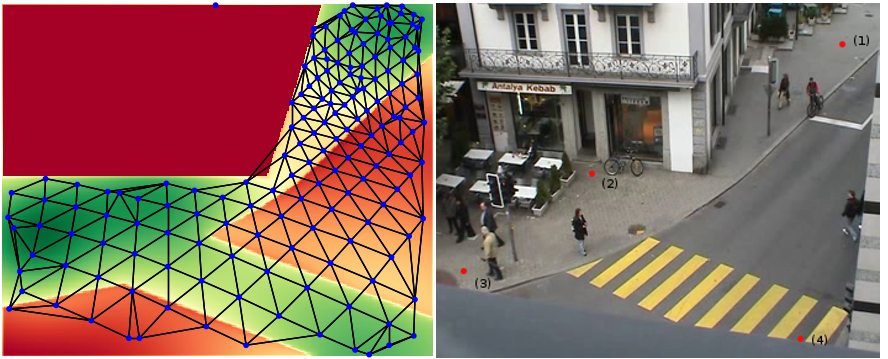
The objective of modeling urban behavior is to predict the trajectories of pedestrians in towns and around cars or platoons (PhD work of P. Vasishta). We first proposed to model pedestrian behaviour in urban scenes by combining the principles of urban planning and the sociological concept of Natural Vision. This model assumes that the environment perceived by pedestrians is composed of multiple potential fields that influence their behaviour. These fields are derived from static scene elements like side-walks, cross-walks, buildings, shops entrances and dynamic obstacles like cars and buses for instance. This work was published in [98]. We then developed an extension to the Growing Hidden Markov Model (GHMM) method that has been proposed to model behavior of pedestrian without observed data or with very few of them. This is achieved by building on existing work using potential cost maps and the principle of Natural Vision. As a consequence, the proposed model is able to predict pedestrian positions more precisely over a longer horizon compared to the state of the art. The method is tested over legal and illegal behavior of pedestrians, having trained the model with sparse observations and partial trajectories. The method, with no training data (see Fig. 17.a), is compared against a trained state of the art model. It is observed that the proposed method is robust even in new, previously unseen areas. This work was published in [99] and won the best student paper of the conference. In 2019, Pavan Vasishta defended his PhD on this topic.
|
Proactive Navigation for navigating dense human populated environments
Participants : Maria Kabtoul, Anne Spalanzani, Philippe Martinet.
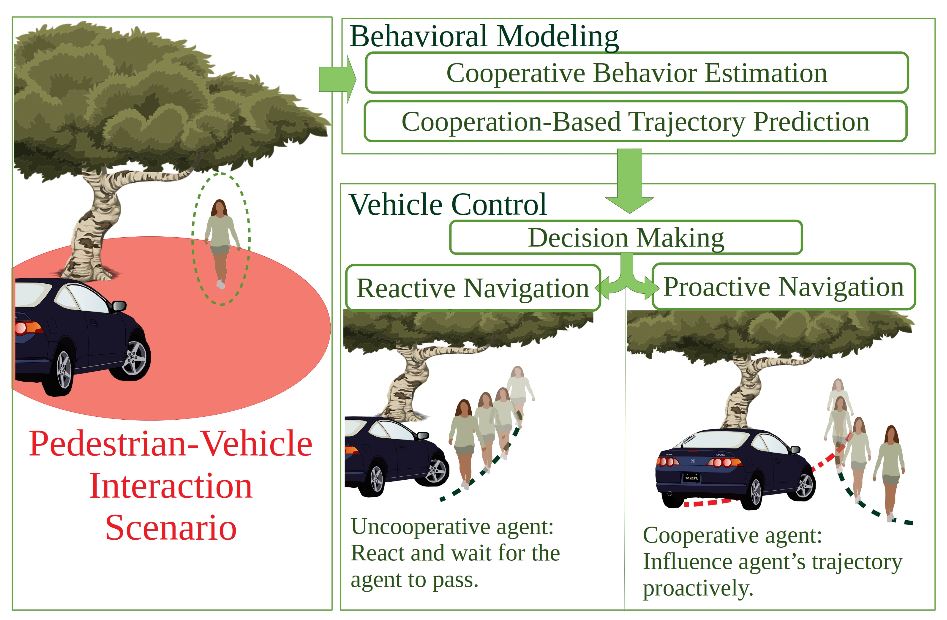
Developing autonomous vehicles capable of navigating safely and socially around pedestrians is a major challenge in intelligent transportation. This challenge cannot be met without understanding pedestrians’ behavioral response to an autonomous vehicle, and the task of building a clear and quantitative description of the pedestrian to vehicle interaction remains a key milestone in autonomous navigation research. As a step towards safe proactive navigation in a spaceshared with pedestrians, we start to introduce in 2018 a pedestrian-vehicle interaction behavioral model. The model estimates the pedestrian’s cooperation with the vehicle in an interaction scenario by a quantitative time-varying function. Using this cooperation estimation the pedestrian’s trajectory is predicted by a cooperation-based trajectory planning model (see Figure 17.b). Both parts of the model are tested and validated using real-life recorded scenarios of pedestrian-vehicle interaction. The model is capable of describing and predicting agents’ behaviors when interacting with a vehicle in both lateral and frontal crossing scenarios.
Modelling crowds and autonomous vehicles using Extended Social Force Models
Participants : Manon Predhumeau, Anne Spalanzani, Julie Dugdale.
The focus of this work has been on the realistic simulation of crowds in shared spaces. We have developed a simulator, based on empirical studies and the state of the art, using PED-SIM software. The simulator takes into account the density of crowds, different social group structures in different contexts, inter and intra group forces, and collision avoidance strategies of pedestrians. The Social Force Model (SFM) successfully reproduces many collective phenomena in evacuations or dense crowds. However, pedestrians behaviour is context dependent and the SFM has some limitations when simulating crowds in an open environment under normal conditions. Specifically, in an urban public square pedestrians tend to expand their personal space and try to avoid dense areas to reduce the risk of collision. Based on the SFM, the proposed model splits the perception of pedestrians into a large perception zone and a restricted frontal zone to which they pay more attention. Through their perceptions, the agents estimate the crowd density and dynamically adapt their personal space. Finally, the original social force is tuned to reflect pedestrians preference of avoiding dense areas by turning rather than slowing down as long as there is enough space. Simulation results show that in the considered context the proposed approach produces more realistic behaviours than the original SFM. The simulated crowd is less dense with the same number of pedestrians and less collisions occur, which better fits the observations of sparse crowds in an open place under normal condition [40].
Deep Reinforcement Learning based Vehicle Navigation amongst pedestrians
Participants : Niranjan Deshpande, Anne Spalanzani, Dominique Vaufreydaz.
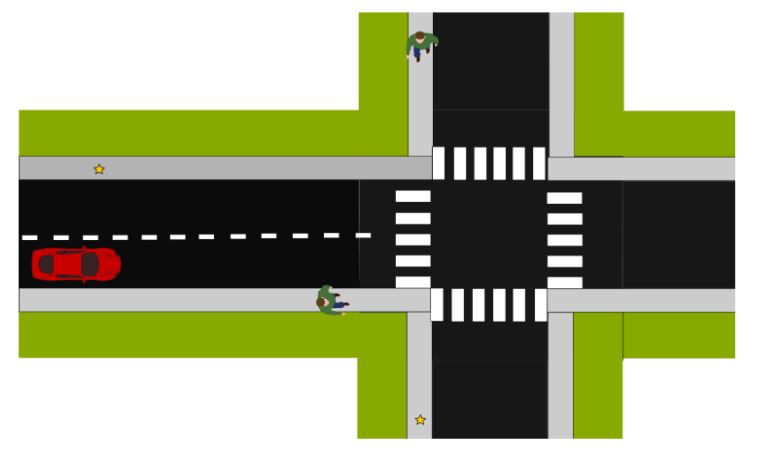
The objective of this work is to develop a navigation system for an autonomous vehicle in urban environments. The urban environment would consist of other road users as well including other vehicles and pedestrians. Specifically, the focus is on the decision making (behaviour planning) aspect of navigation. In this work, we propose to use Deep Reinforcement Learning as a method to learn decision making. We have developed a Deep Q-Network based agent for decision making amongst pedestrians using the SUMO simulator. This Deep Q-Network based agent is trained for a typical intersection crossing setup amongst pedestrians (see Figure 18). We propose a grid based representation as a state space input to the learning agent. With this grid based representation and our reward function the agent learns a policy capable of driving safely around pedestrians and also follow the traffic rule. This work was published in [35].