

Section: New Results
Intrinsically Motivated Learning in Artificial Intelligence
Intrinsically Motivated Goal Exploration and Goal-Parameterized Reinforcement Learning
Participants : Sébastien Forestier, Pierre-Yves Oudeyer [correspondant] , Olivier Sigaud, Cédric Colas, Adrien Laversanne-Finot, Rémy Portelas, Grgur Kovac.
Intrinsically Motivated Exploration of Modular Goal Spaces and the Emergence of Tool use
A major challenge in robotics is to learn goal-parametrized policies to solve multi-task reinforcement learning problems in high-dimensional continuous action and effect spaces. Of particular interest is the acquisition of inverse models which map a space of sensorimotor goals to a space of motor programs that solve them. For example, this could be a robot learning which movements of the arm and hand can push or throw an object in each of several target locations, or which arm movements allow to produce which displacements of several objects potentially interacting with each other, e.g. in the case of tool use. Specifically, acquiring such repertoires of skills through incremental exploration of the environment has been argued to be a key target for life-long developmental learning [54].
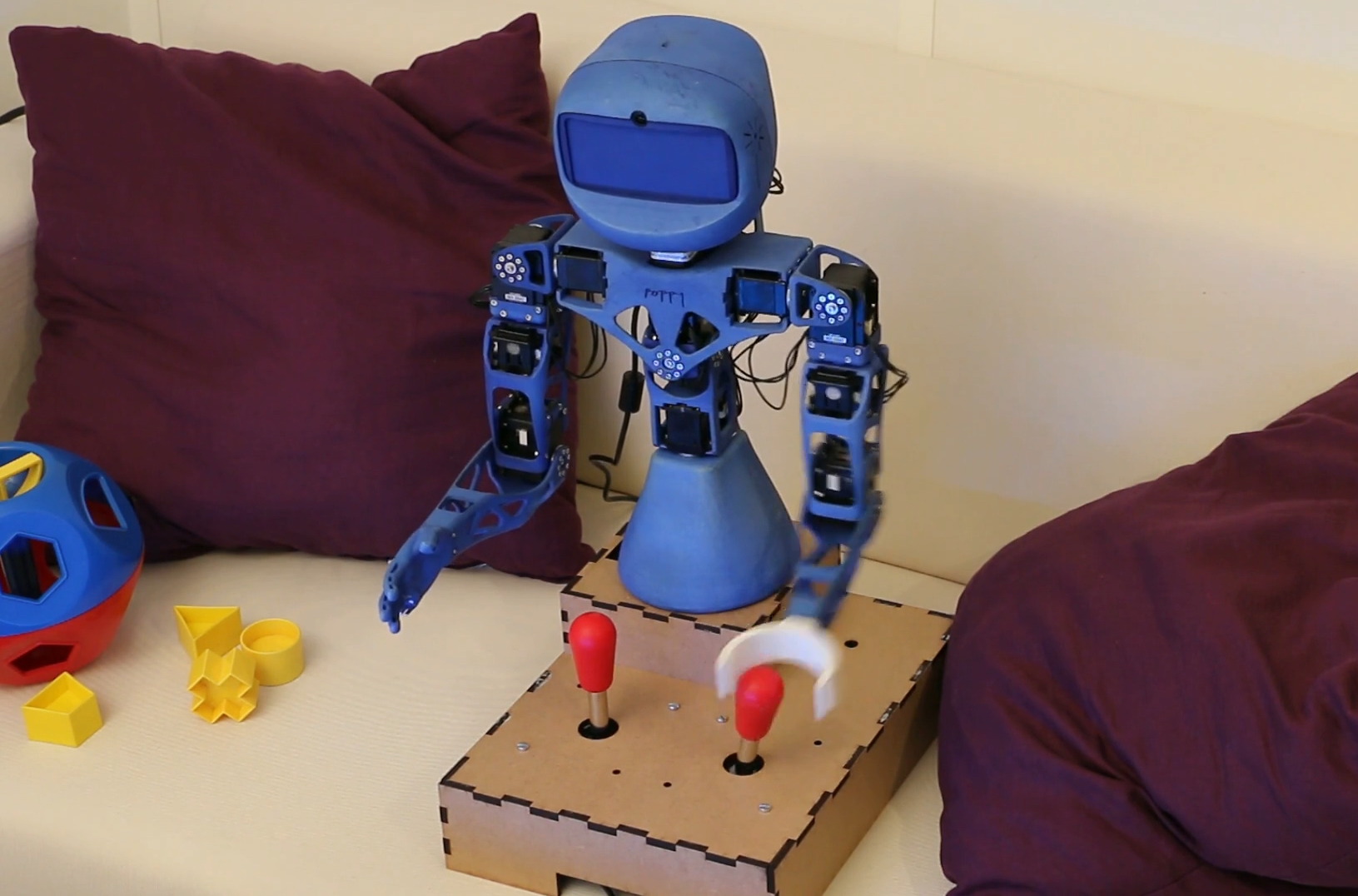
Recently, we developed a formal framework called "Intrinsically motivated goal exploration processes" (IMGEPs), enabling study agents that generate and sequence their own goals to learn world models and skill repertoirs, that is both more compact and more general than our previous models [82]. We experimented several implementations of these processes in a complex robotic setup with multiple objects (see Fig. 7), associated to multiple spaces of parameterized reinforcement learning problems, and where the robot can learn how to use certain objects as tools to manipulate other objects. We analyzed how curriculum learning is automated in this unsupervised multi-goal exploration process, and compared the trajectory of exploration and learning of these spaces of problems with the one generated by other mechanisms such as hand-designed learning curriculum, or exploration targeting a single space of problems, and random motor exploration. We showed that learning several spaces of diverse problems can be more efficient for learning complex skills than only trying to directly learn these complex skills. We illustrated the computational efficiency of IMGEPs as these robotic experiments use a simple memory-based low-level policy representations and search algorithm, enabling the whole system to learn online and incrementally on a Raspberry Pi 3.
|

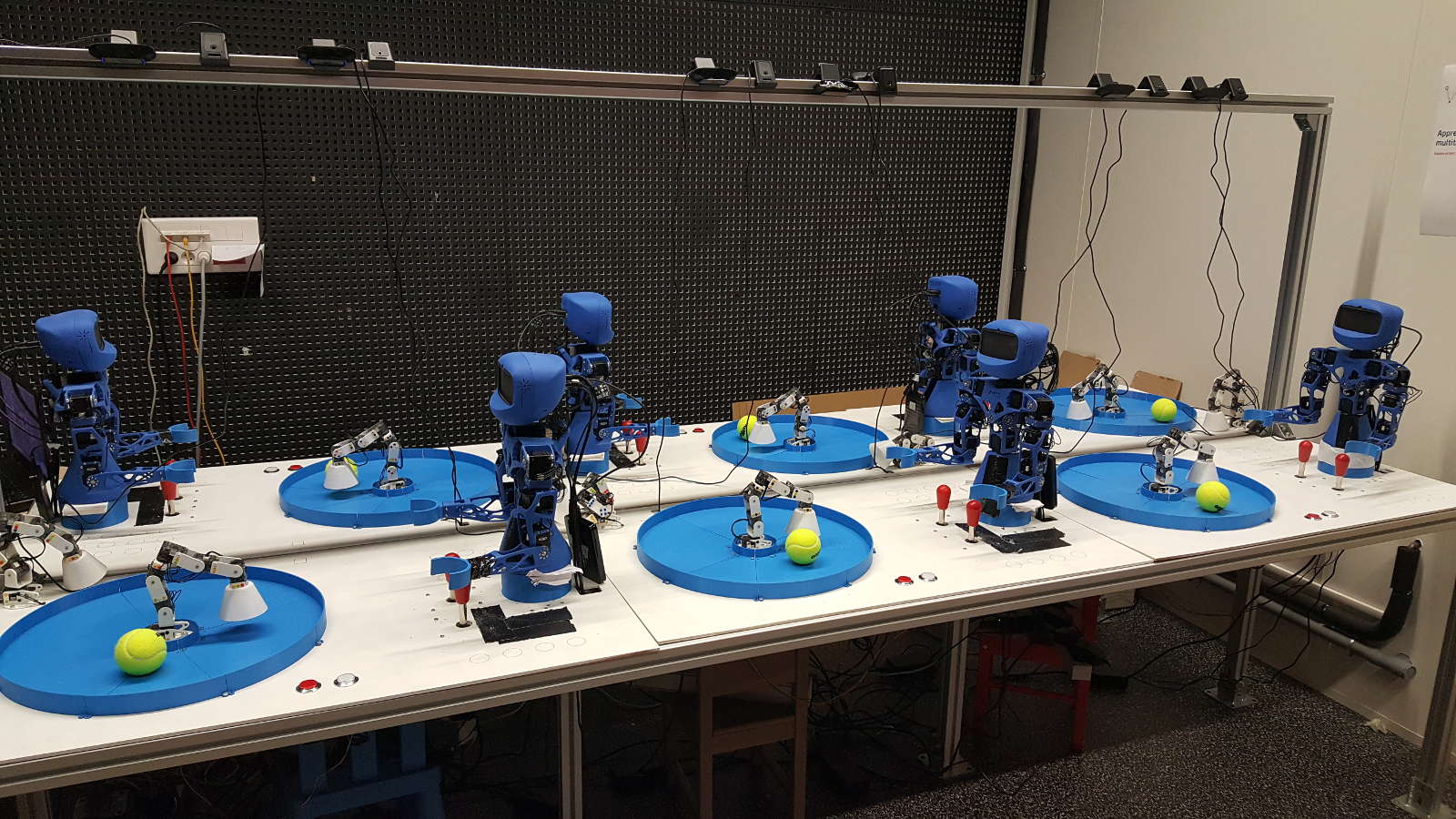
In order to run many systematic scientific experiments in a shorter time, we scaled up this experimental setup to a platform of 6 identical Poppy Torso robots, each of them having the same environment to interact with. Every robot can run a different task with a specific algorithm and parameters each (see Fig. 8). Moreover, each Poppy Torso can also perceives the motion of a second Poppy Ergo robot, than can be used, this time, as a distractor performing random motions to complicate the learning problem. 12 top cameras and 6 head cameras can dump video streams during experiments, in order to record video datasets. This setup is now used to perform more experiments to compare different variants of curiosity-driven learning algorithms.
|
Leveraging the Malmo Minecraft platform to study IMGEP in rich simulations
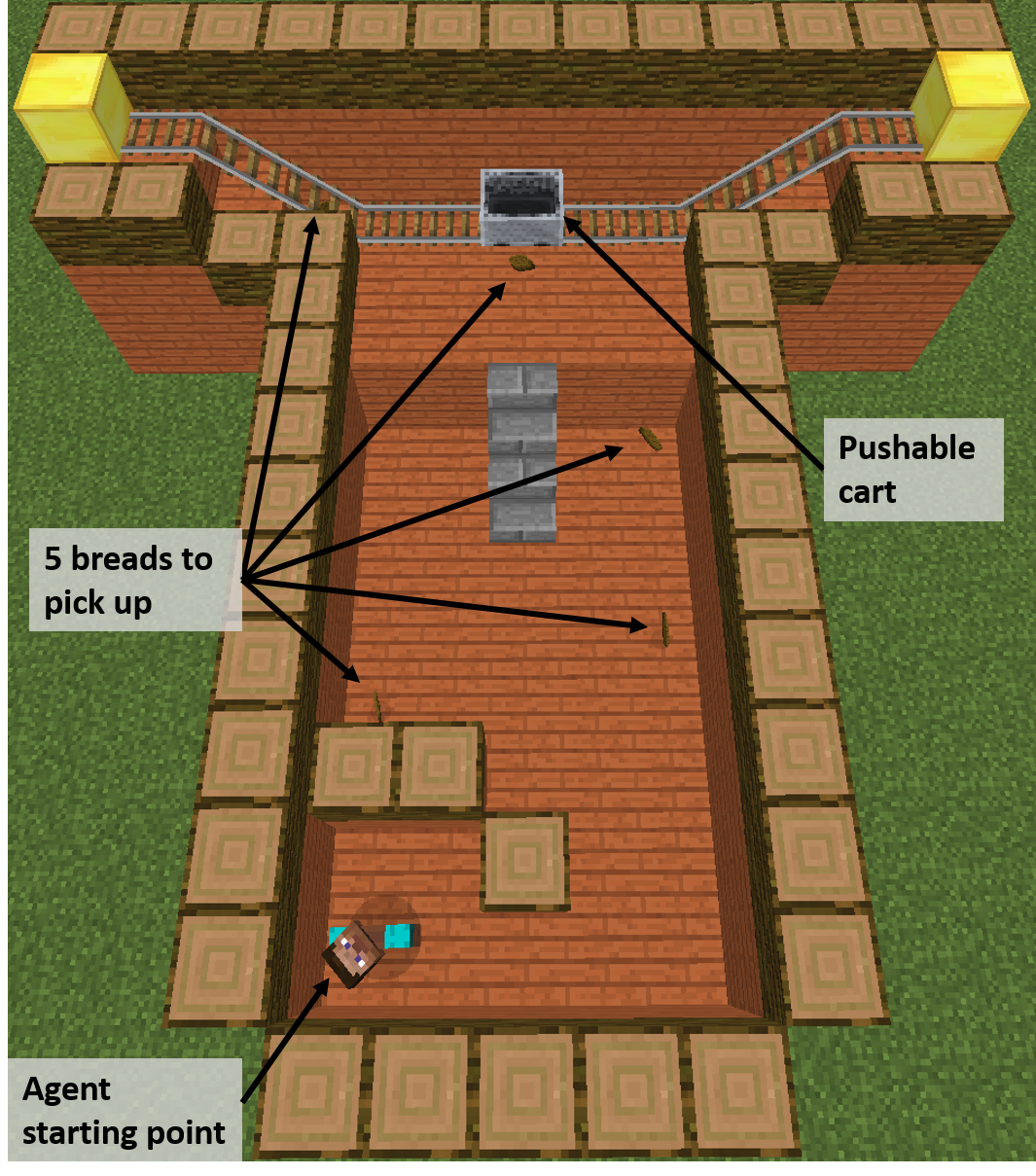
We continued to leverage the Malmo platform to study curiosity-driven learning applied to multi-goal reinforcement learning tasks (https://github.com/Microsoft/malmo). The first step was to implement an environment called Malmo Mountain Cart (MMC), designed to be well suited to study multi-goal reinforcement learning (see figure [9]). We then showed that IMGEP methods could efficiently explore the MMC environment without any extrinsic rewards. We further showed that, even in the presence of distractors in the goal space, IMGEP methods still managed to discover complex behaviors such as reaching and swinging the cart, especially Active Model Babbling which ignored distractors by monitoring learning progress.
|
Unsupervised Learning of Modular Goal Spaces for Intrinsically Motivated Goal Exploration
Intrinsically motivated goal exploration algorithms enable machines to discover repertoires of policies that produce a diversity of effects in complex environments. These exploration algorithms have been shown to allow real world robots to acquire skills such as tool use in high-dimensional continuous state and action spaces, as shown in previous sections. However, they have so far assumed that self-generated goals are sampled in a specifically engineered feature space, limiting their autonomy. We have proposed an approach using deep representation learning algorithms to learn an adequate goal space. This is a developmental 2-stage approach: first, in a perceptual learning stage, deep learning algorithms use passive raw sensor observations of world changes to learn a corresponding latent space; then goal exploration happens in a second stage by sampling goals in this latent space. We made experiments with a simulated robot arm interacting with an object, and we show that exploration algorithms using such learned representations can closely match, and even sometimes improve, the performance obtained using engineered representations. This work was presented at ICLR 2018 [136].
However, in the case of more complex environments containing multiple objects or distractors, an efficient exploration requires that the structure of the goal space reflects the one of the environment. We studied how the structure of the learned goal space using a representation learning algorithm impacts the exploration phase. In particular, we studied how disentangled representations compare to their entangled counterparts in a paper published at CoRL 2019 [101], associated with a blog post available at: https://openlab-flowers.inria.fr/t/discovery-of-independently-controllable-features-through-autonomous-goal-setting/494.
Those ideas were evaluated on a simple benchmark where a seven joints robotic arm evolves in an environment containing two balls. One of the ball can be grasped by the arm and moved around whereas the second one acts as a distractor: it cannot be grasped by the robotic arm and moves randomly across the environment.
|
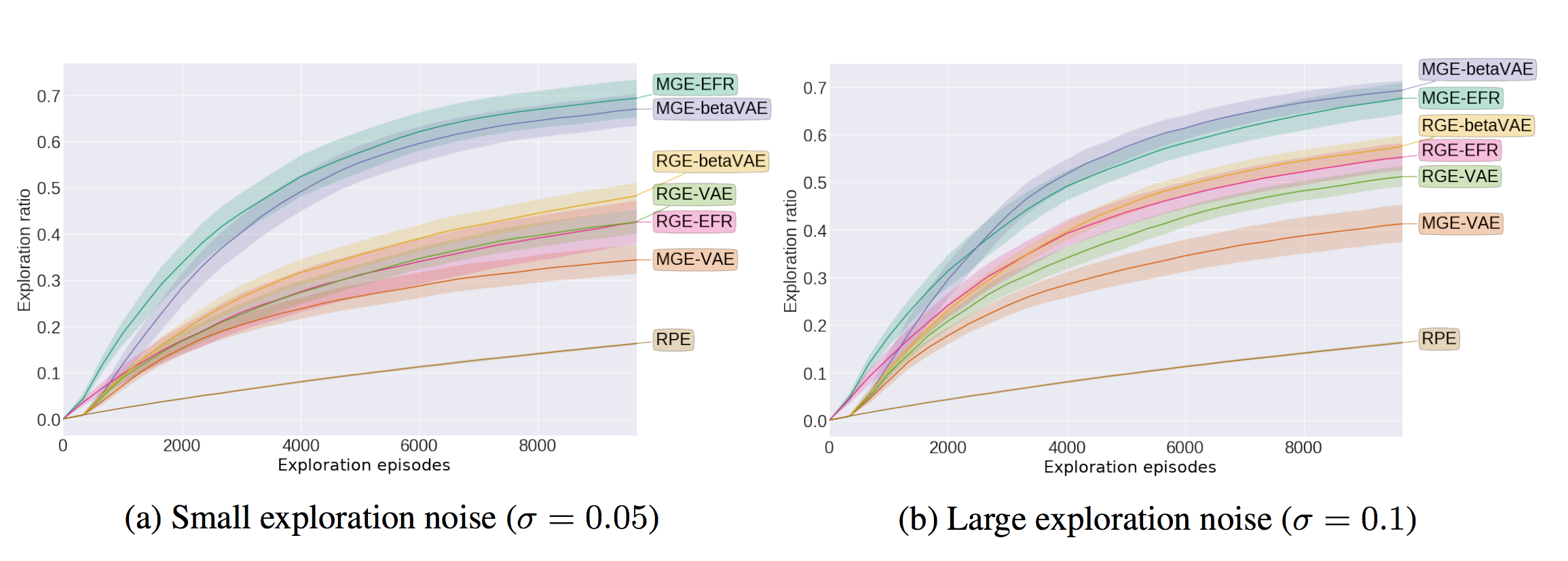
Our results showed that using a disentangled goal space leads to better exploration performances than an entangled goal space: the goal exploration algorithm discovers a wider variety of outcomes in less exploration steps (see Figure 10). We further showed that when the representation is disentangled, one can leverage it by sampling goals that maximize learning progress in a modular manner. Lastly, we have shown that the measure of learning progress, used to drive curiosity-driven exploration, can be used simultaneously to discover abstract independently controllable features of the environment.
Finally, we experimented the applicability of those principles on a real-world robotic setup, where a 6-joint robotic arm learns to manipulate a ball inside an arena, by choosing goals in a space learned from its past experience, presented in this technical report: https://arxiv.org/abs/1906.03967.
Monolithic Intrinsically Motivated Modular Multi-Goal Reinforcement Learning
In this project we merged two families of algorithms. The first family is the population-based Intrinsically Motivated Goal Exploration Processes (IMGEP) developped in the team (see [83] for a presentation). In this family, autonomous learning agents sets their own goals and learn to reach them. Intrinsic motivation under the form of absolute learning progress is used to guide the selection of goals to target. In some variations of this framework, goals can be represented as coming from different modules or tasks. Intrinsic motivations are then used to guide the choice of the next task to target.
The second family encompasses goal-parameterized reinforcement learning algorithms. The first algorithm of this category used an architecture called Universal Value Function Approximators (UVFA), and enabled to train a single policy on an infinite number of goals (continuous goal spaces) [144] by appending the current goal to the input of the neural network used to approximate the value function and the policy. Using a single network allows to share weights among the different goals, which results in faster learning (shared representations). Later, HER [51] introduced a goal replay policy: the actual goal aimed at, could be replaced by a fictive goal when learning. This could be thought of as if the agent were pretending it wanted to reach a goal that it actually reached later on in the trajectory, in place of the true goal. This enables cross-goal learning and speeds up training. Finally, UNICORN [111] proposed to use UVFA to achieve multi-task learning with a discrete task-set.
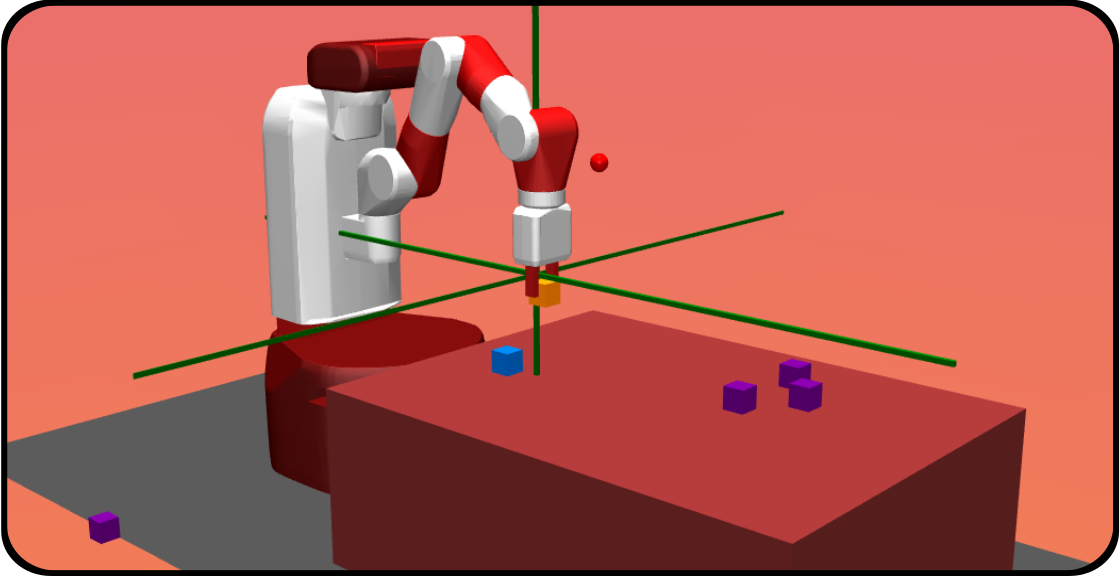
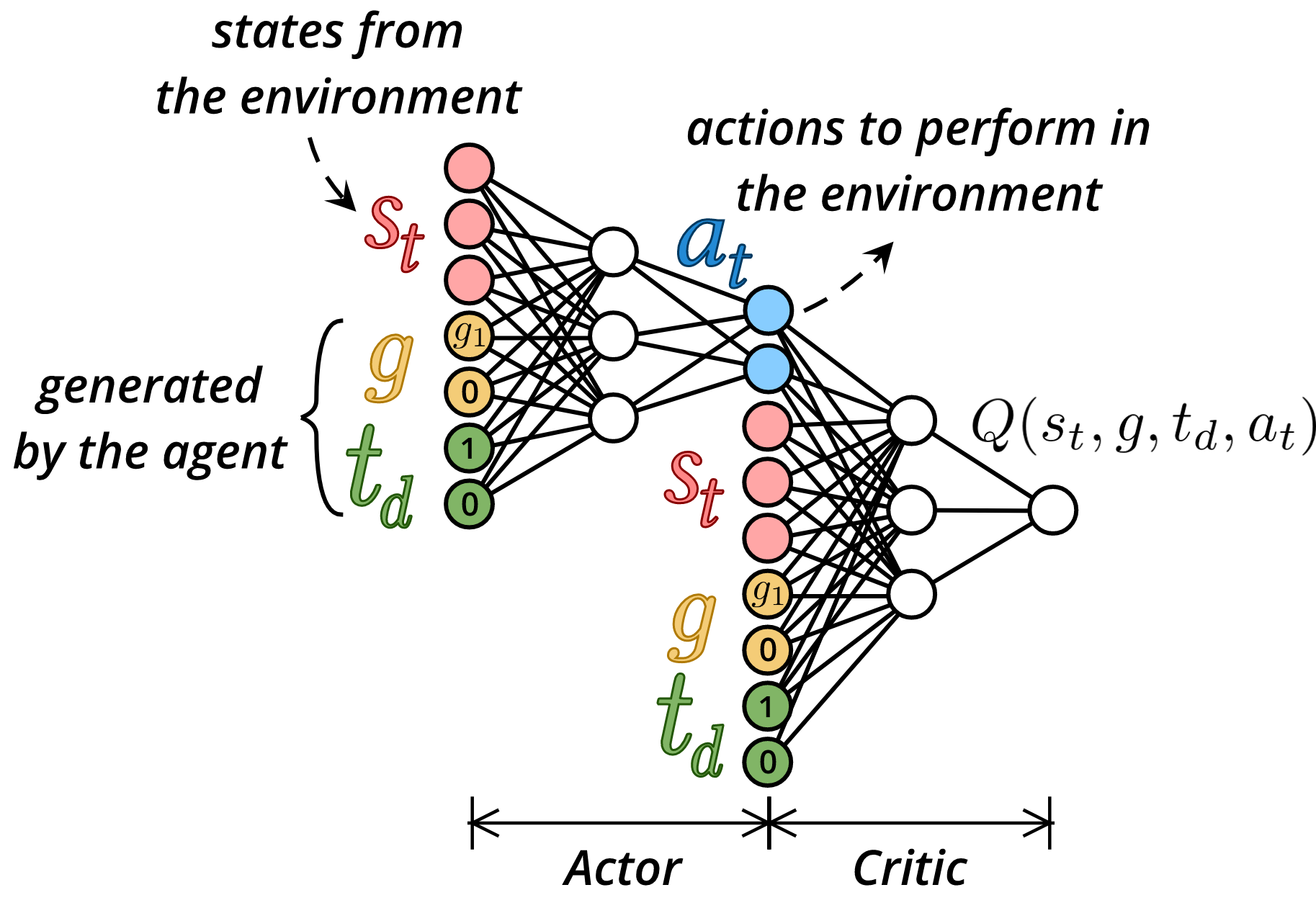
In this project, we developed CURIOUS [33] (ICML 2019), an intrinsically motivated reinforcement learning algorithm able to achieve both multiple tasks and multiple goals with a single neural policy. It was tested on a custom multi-task, multi-goal environment adapted from the OpenAI Gym Fetch environments [61], see Figure 11. CURIOUS is inspired from the second family as it proposes an extension of the UVFA architecture. Here, the current task is encoded by a one-hot code corresponding to the task id. The goal is of size where is the goal space corresponding to task . All components are zeroed except the ones corresponding to the current goal of the current task , see Figure 12.
|
CURIOUS is also inspired from the first family, as it self-generates its own tasks and goals and uses a measure of learning progress to decide which task to target at any given moment. The learning progress is computed as the absolute value of the difference of non-overlapping window average of the successes or failures
where describes a success (1) or a failure (0) and is a time window length. The learning progress is then used in two ways: it guides the selection of the next task to attempt, and it guides the selection of the task to replay. Cross-goal and cross-task learning are achieved by replacing the goal and/or task in the transition by another. When training on one combination of task and goal, the agent can therefore use this sample to learn about other tasks and goals. Here, we decide to replay and learn more on tasks for which the absolute learning progress is high. This helps for several reasons: 1) the agent does not focus on already learned tasks, as the corresponding learning progress is null, 2) the agent does not focus on impossible tasks for the same reason. The agent focuses more on tasks that are being learned (therefore maximizing learning progress), and on tasks that are being forgotten (therefore fighting the problem of forgetting). Indeed, when many tasks are learned in a same network, chances are tasks that are not being attempted often will be forgotten after a while.
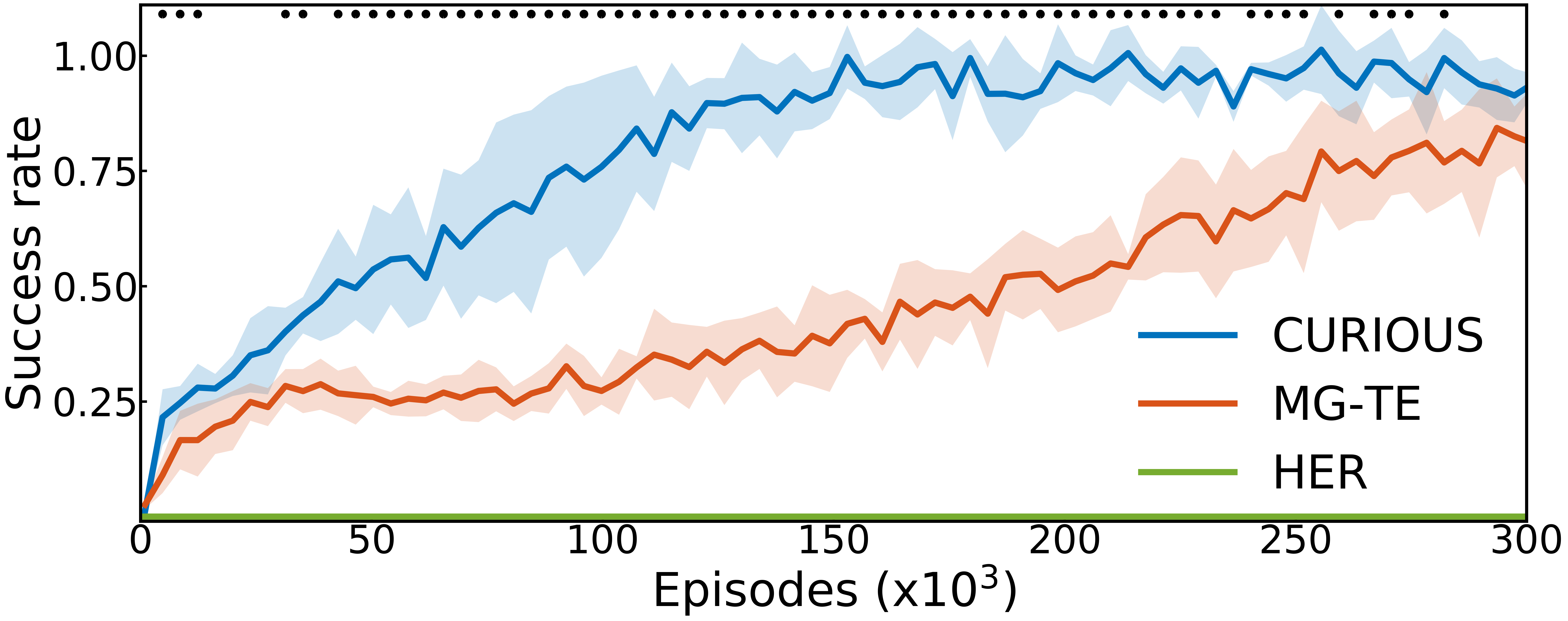
In this project, we compare CURIOUS to two baselines: 1) a flat representation algorithm where goals are set from a multi dimensional space including all tasks (equivalent to HER); 2) a task-expert algorithm where a multi-goal UVFA expert policy is trained for each task. The results are shown in Figure 13.
Autonomous Multi-Goal Reinforcement Learning with Natural Language
This project follows the CURIOUS project on intrinsically motivated modular multi-goal reinforcement learning [33]. In the CURIOUS algorithm, we presented an agent able to tackle multiple goals of multiple types using a single controller. However, the agent needed to have access to the description of each of the goal types, and their associated reward functions. This represents a considerable amount of prior knowledge for the engineer to encode into the agent. In our new project, the agent builds its own representations of goals, can tackle a growing set of goals, and learns its own reward function, all this through interactions in natural language with a social partner.
The agent does not know any potential goal at first, and act randomly. As it reaches outcomes that are meaningful for the social partner, the social partner provides descriptions of the scene in natural language. The agent stores descriptions and corresponding states for two purposes. First it builds a list of potential goals, reaching back these outcomes that the social partner described. Second, it uses the combination of state and state description to learn a reward function, mapping current state and language descriptions to a binary feedback: 1 if the description is satisfied by the current state, 0 if not.
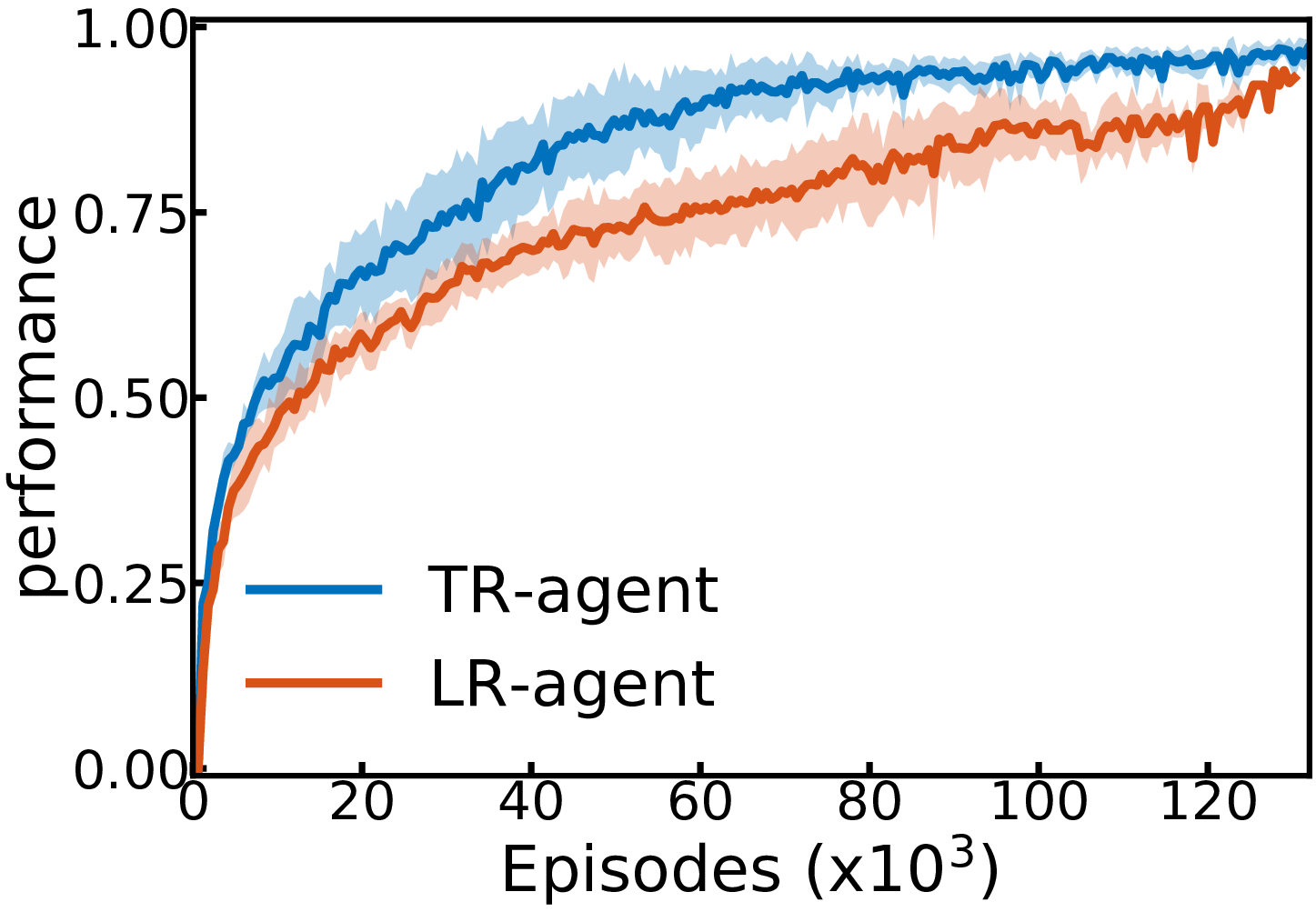
The agent sets goals to itself from the set of previously discovered descriptions, and is able to learn how to reach them thanks to its learned internal reward function. Concretely, the agent learns a set of 50+ goals from these interactions. We showed co-learning of the reward function and the policy did not produce consequent overhead compared to using an oracle reward function (see Figure 14). This project led to an article accepted at the NeurIPS workshop Visually Grounded Interaction and Language [35]. Current work aims at learning the language model mapping the description into a continuous goal space used as input to the policy and reward function using recurrent networks.
|
Intrinsically Motivated Exploration and Multi-Goal RL with First-Person Images
The aim of this project is to create an exploration process in first-person 3D environments. Following the work presented in [121], [135], [157] the current algorithm is setup in a similar manner. The agent observes the environment in a first person manner and is given a goal to reach. Furthermore, the goal policy samples goals that encourage the agent to explore the environment.
Currently, there are two ways of representing and sampling goals. Following [157] the goal policy has a buffer of states previously visited by the agent and samples from this buffer the next goals as first person observations. In this setting a goal conditioned reward function is also learned in the form of a reachability network introduced in [142]. On the other hand, following [136], [121] and [135] one can learn a latent representation of a goal using an autoencoder (VAE) and then sample from this generative model or in the latent space. Then, we can use the L2 distance in the latent space as a reward function. The experiments are conducted on a set of Unity environments created in the team.
Teacher algorithms for curriculum learning of Deep RL in continuously parameterized environments
Participants : Remy Portelas [correspondant] , Katja Hoffman, Pierre-Yves Oudeyer.
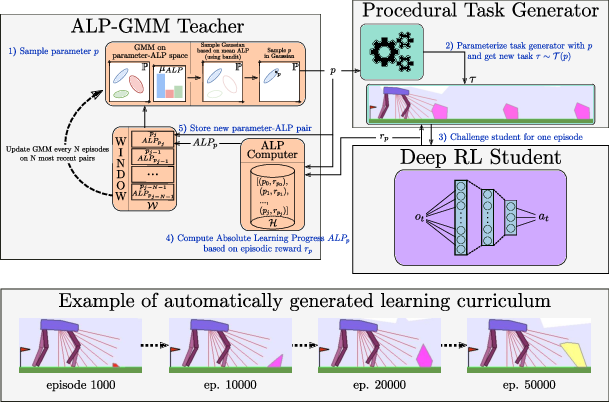
In this work we considered the problem of how a teacher algorithm can enable an unknown Deep Reinforcement Learning (DRL) student to become good at a skill over a wide range of diverse environments. To do so, we studied how a teacher algorithm can learn to generate a learning curriculum, whereby it sequentially samples parameters controlling a stochastic procedural generation of environments. Because it does not initially know the capacities of its student, a key challenge for the teacher is to discover which environments are easy, difficult or unlearnable, and in what order to propose them to maximize the efficiency of learning over the learnable ones. To achieve this, this problem is transformed into a surrogate continuous bandit problem where the teacher samples environments in order to maximize absolute learning progress of its student. We presented ALP-GMM (see figure 15), a new algorithm modeling absolute learning progress with Gaussian mixture models. We also adapted existing algorithms and provided a complete study in the context of DRL. Using parameterized variants of the BipedalWalker environment, we studied their efficiency to personalize a learning curriculum for different learners (embodiments), their robustness to the ratio of learnable/unlearnable environments, and their scalability to non-linear and high-dimensional parameter spaces. Videos and code are available at https://github.com/flowersteam/teachDeepRL.
|
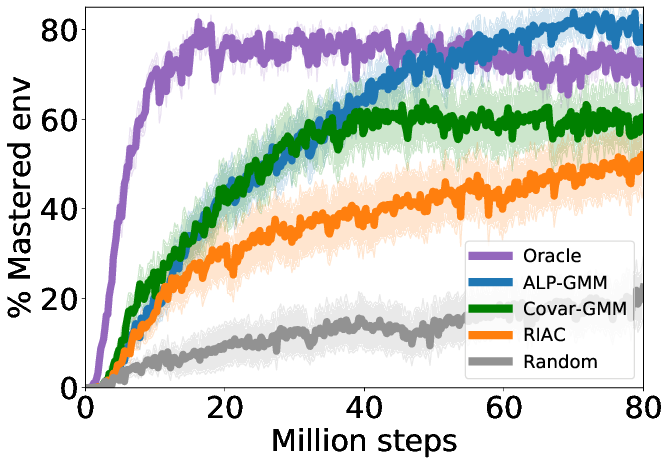
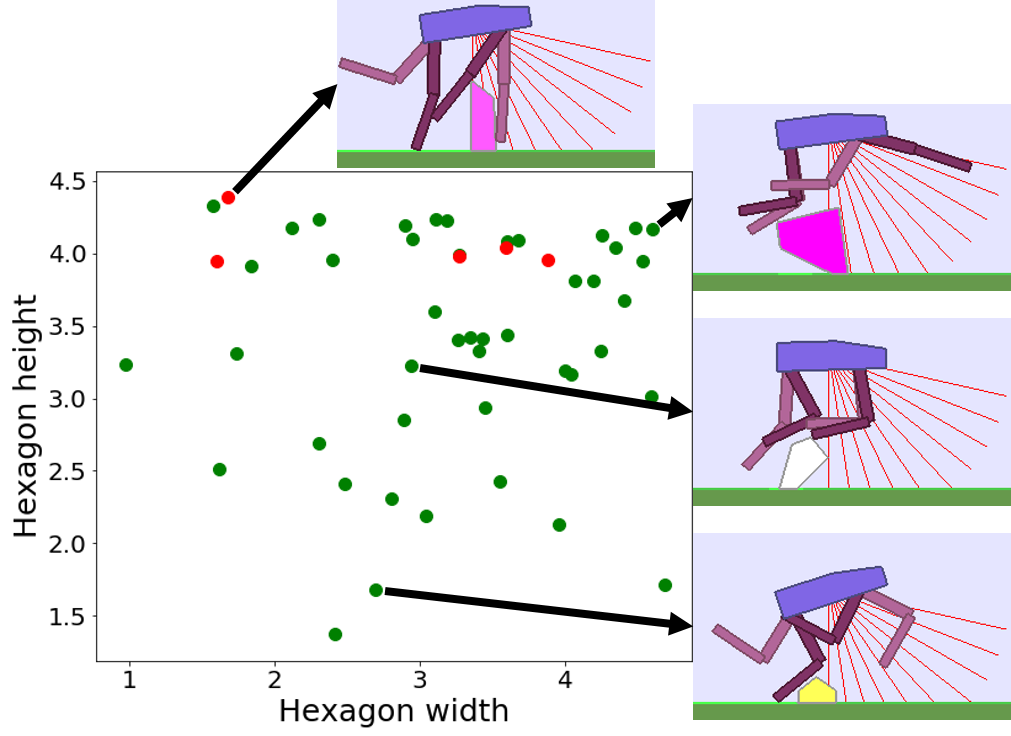
Overall, this work demonstrated that LP-based teacher algorithms could successfully guide DRL agents to learn in difficult continuously parameterized environments with irrelevant dimensions and large proportions of unfeasible tasks. With no prior knowledge of its student's abilities and only loose boundaries on the task space, ALP-GMM, our proposed teacher, consistently outperformed random heuristics and occasionally even expert-designed curricula (see figure 16). This work was presented at CoRL 2019 [38].
ALP-GMM, which is conceptually simple and has very few crucial hyperparameters, opens-up exciting perspectives inside and outside DRL for curriculum learning problems. Within DRL, it could be applied to previous work on autonomous goal exploration through incremental building of goal spaces [101]. In this case several ALP-GMM instances could scaffold the learning agent in each of its autonomously discovered goal spaces. Another domain of applicability is assisted education, for which current state of the art relies heavily on expert knowledge [68] and is mostly applied to discrete task sets.