Section: New Results
3D-modelling of urban scenes
Buiding reconstruction from aerial LiDAR data
Participants : Yannick Verdie, Florent Lafarge [contact] , Josiane Zerubia.
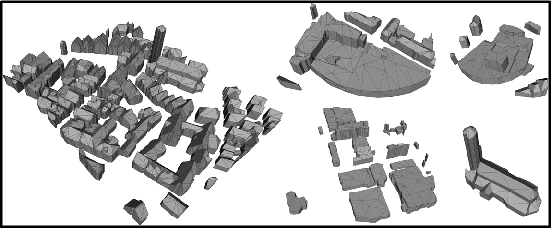
The generation of 3D representations of urban environments from aerial and satellite data is a topic of growing interest in image processing and computer vision. Such environments are helpful in many fields including urban planning, wireless communications, disaster recovery, navigation aids, and computer games. Laser scans have become more popular than multiview aerial/satellite images thanks to the accuracy of their measurements and the decrease in the cost of their acquisition. In particular, full-waveform topographic LIDAR constitutes a new kind of laser technology providing interesting information for urban scene analysis. We study new stochastic models for analysing urban areas from LIDAR data. We aim to construct concrete solutions to both urban object classification (i.e. detecting buildings, vegetation, etc.) and the 3D reconstruction of these objects. Probabilistic tools are well adapted to handling such urban objects, which may differ significantly in terms of complexity, diversity, and density within the same scene. In particular, jump-diffusion based samplers offer interesting perspectives for modelling complex interactions between the various urban objects. We investigated a first approach aiming at producing accurate, watertight and compact meshes from planar patches under planar constraint especially designed for urban scenes. The LiDAR point cloud is classified through a non-convex energy minimization problem. The planar structures are extracted and connected to generate a compact, and watertight mesh of the building. Experiments highlight the potential of our method in term of performance, compactness, and accuracy. This work has been published in [22] . We illustrated our results in figure 13 .
|
Modeling large urban environments from unstructured point clouds
Participant : Florent Lafarge [contact] .
We present a robust method for modeling cities from unstructured point data. Our algorithm provides a more complete description than existing approaches by reconstructing simultaneously buildings, trees and topologically complex grounds. Buildings are modeled by an original approach which guarantees a high generalization level while having semantized and compact representations. Geometric 3D-primitives such as planes, cylinders, spheres or cones describe regular roof sections, and are combined with mesh-patches that represent irregular roof components. The various urban components interact through a non-convex energy minimization problem in which they are propagated under arrangement constraints over a planimetric map. We experimentally validate the approach on complex urban structures and large urban scenes of millions of points as illustrated on Figure 14 .

Parallel Monte Carlo sampler for point processes
Participants : Yannick Verdie, Florent Lafarge [contact] , Ioan Dragan.
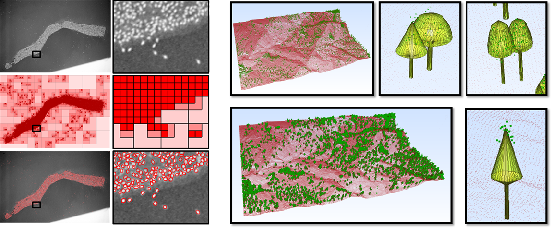
We designed a new parallel scheme for Markov point processes. These probabilistic models exploit random variables whose realizations are configurations of parametric objects, each object being assigned to a point positioned in the scene. The number of objects is itself a random variable. Another strength of Markov point processes is their ability to take into account complex spatial interactions between the objects and to impose global regularization constraints. Moreover, we proposed to use space-partitioning tree such as quadtree (for 2D data) or octree (for 3D data) for non-homogeneous measure adapted to the problem. We illustrate the results in figure 15 .