

Section: New Software and Platforms
Platforms
ALIAS, Algorithms Library of Interval Analysis for Systems
The ALIAS library whose development started in 1998, is a collection of procedures based on interval analysis for systems solving and optimization.
ALIAS is made of two parts:
ALIAS-C++ : the C++ library (87 000 code lines) which is the core of the algorithms
ALIAS-Maple : the Maple interface for ALIAS-C++ (55 000 code lines). This interface allows one to specify a solving problem within Maple and get the results within the same Maple session. The role of this interface is not only to generate the C++ code automatically, but also to perform an analysis of the problem in order to improve the efficiency of the solver. Furthermore, a distributed implementation of the algorithms is available directly within the interface.
Hardware platforms
We describe here only the new platforms that have been developed in 2017 while we maintain a very large number of platforms (e.g. the cable-driven parallel robots of the MARIONET family, the ANG family of walking aids or our experimental flat).
GMSIVE ADT: virtual reality and rehabilitation
Inria has agreed to fund us for developing the platform GMSIVE whose purpose is to introduce end-user motion and their analysis in a virtual reality environment in order to make rehabilitation exercises more attractive and more appropriate for the rehabilitation process. For example we have developed an active treadmill whose slope will change according to the user place in the virtual world while the lateral inclination may be changed in order to regulate the load between the left and right leg. Such a system may be used in rehabilitation to simulate a walk in the mountain while increasing on-demand the load on an injured leg (that is usually avoided by the user) for a shorter rehabilitation time. At the same time the walking pattern is analyzed in order to assess the efficiency of the rehabilitation exercise.
The motion system is composed of two vertical columns whose height may be adjusted (they are used for actuating the treadmill), a 6 d.o.f motion base and a cable-driven parallel robot which may lift the user (in the walking experiment this robot may be used to support partly the user while he is walking allowing frail people to start the rehabilitation earlier). We intend to develop sailing and ski simulators as additional rehabilitation environment. Currently the columns and motion base are effective while the robot has been installed but not tested yet and we have started to study the coupling between the motion generators and the 3D visualization.
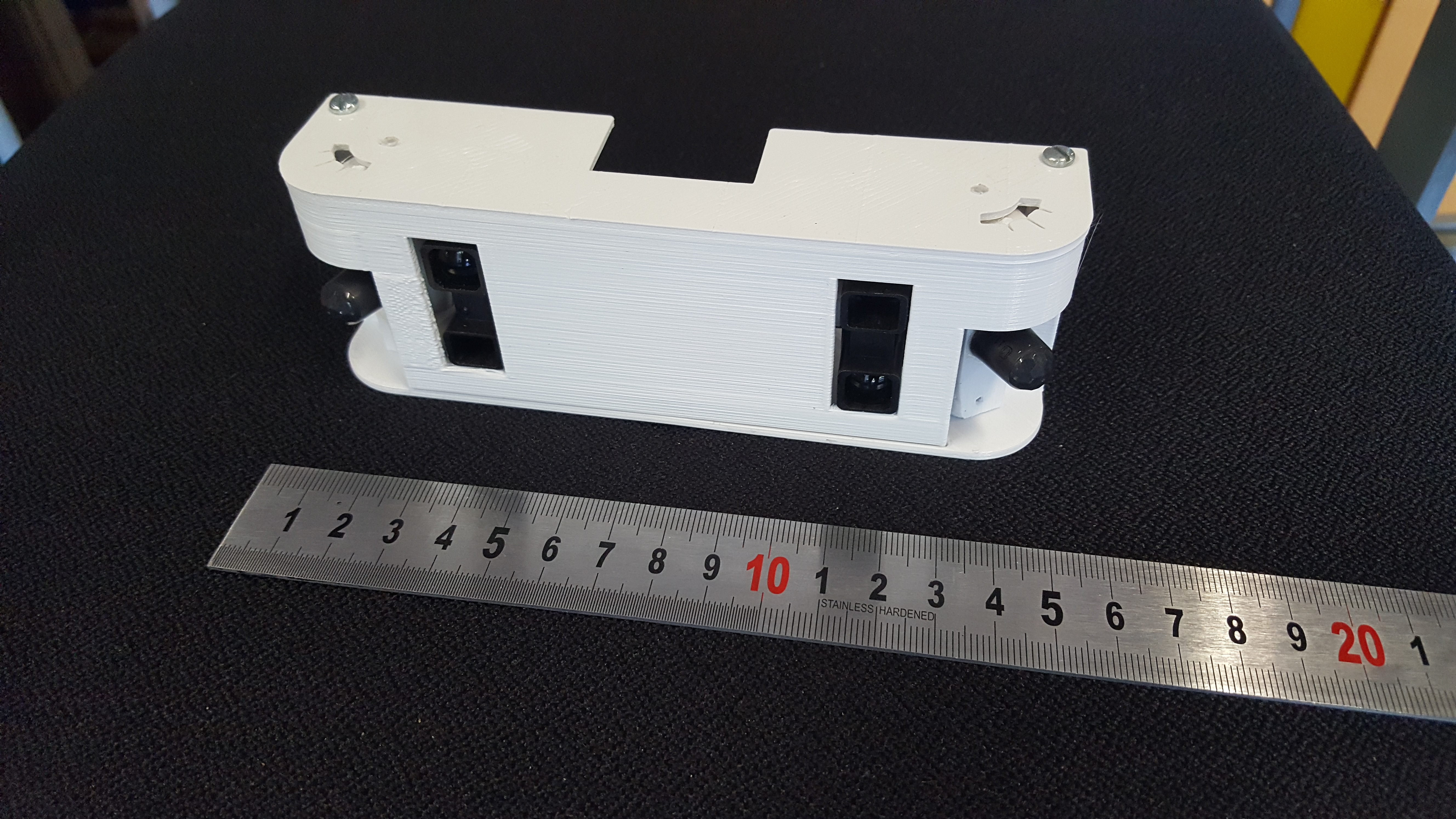
Activities detection platform
For non intrusive activities detection we use low cost distance and motion sensors that are incorporated in a 3D printed box (figure 1) and constitute a detection station. Several such station are implemented at appropriate place in the location that has to be monitored (e.g. the Valrose EHPAD where 15 such stations has been deployed at the end of 2016 while 17 stations have been deployed at Institut Claude Pompidou at the end of 2017). Although the information provided by each station is relatively poor an appropriate network of such station allow us to provide the information requested by the medical community.
|
Instrumented cane
An alternate to the walker is using a cane for elderly support and for rehabilitation. We have developed two cane prototypes instrumented with accelerometers and force sensor (figure 2) with the purpose of monitoring the walking pattern and assess rehabilitation exercises in a more objective way. These canes have also led lights that are automatically activated at night when the cane is in motion while the ambient lightning is low with the purpose of decreasing the fall risk and to help for navigation.

Instrumented gloves
An important part of a rehabilitation process is to assess, on a regular basis, the motricity of the patient. The standard protocol for this assessment is to ask the patient to perform standardized motion while a therapist puts the palm of his/her hand in opposition to measure the pressure exerted by the patient. This intuitive measurement is converted into a simplified ranking from 0 to 5 but, as mentioned by therapists, the subjectivity of this ranking is high. We have developed a glove that is able to measure the pressure and may provide a more objective assessment.

