

Section: New Results
Robotics
Analysis of Cable-driven parallel robots
Participants : Alain Coulbois, Artem Melnyk, Jean-Pierre Merlet [correspondant] , Yves Papegay.
We have continued the analysis of suspended CDPRs for control and design purposes. This analysis is heavily dependent on the behavior of the cable. Three main models can be used: ideal (no deformation of the cable due to the tension, the cable shape is a straight line between the attachements points), elastic (cable length changes according to the tension to which it is submitted, straight line cable shape) and sagging (cable shape is not a line as the cable is submitted to its own mass). The different models leads to very different analysis with a complexity increasing from ideal to sagging. All cables exhibit sagging but the sagging effect may often be neglected if the CDPR is relatively small while the sagging cannot be neglected for large CDPRs. Still even when using the ideal cable model we are contronted to complex issues. For example CDPR simulation assumes continuous time control while in reality discrete-time control is used. We have proposed a discrete-time simulation tools of CDPR [10] with surprising results (much larger tension variation in the cable, oscillation) and a complex implementation (the numerical accuracy that is required to get exact results very often exceed floating-point accuracy) that has required a very strict mathematical analysis.
For control it is essential to determine the current pose of the robot for given cable lengths (forward kinematics, FK) and to be able to calculate the cable lengths for a given pose of the platform (inverse kinematics, IK). IK for ideal cable is straightforward while more complicated for elastic cables and very complex for sagging cables. As for FK it is already complex for ideal and elastic cables while very difficult for sagging cable. We have proposed last year IK and FK solving scheme for sagging cables but they are relatively computer intensive. A major problem for the FK is that it usually provides several solutions while the control requires to determine only the solution corresponding to the current pose of the platform. A natural approach to both speed-up the FK algorithm and to get only the current pose is to add sensors on the robot. Measuring the cable tensions will be useful but has been shown to be very difficult and noisy while measuring the cable and platform orientation may be possible. But it is necessary to investigate how many sensors and their location are necessary to get a single solution for the FK: we have provided an extensive analysis of this problem for all 3 cable models [16],[17].
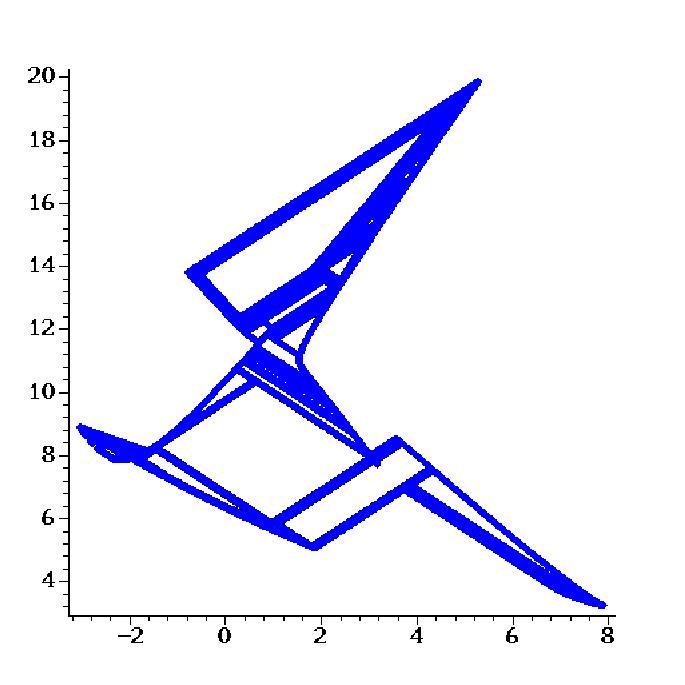
Last year we have investigated the calculation of cross-section of the workspace of CDPR with ideal and elastic cables, using approaches that are too computer intensive for sagging cable. We have proposed this year a preliminary algorithm for CDPRs with sagging cable that is much efficient [15] as it is based on an approximate continuation method for finding the border but it is still computer intensive. Figure 4 presents a horizontal cross-section of the workspace: the blue area are in fact the concatenation of the border of several zones that are part or are outside the workspace. In view of the complexity of the workspace border it appears that progress have to be made on that topic.
Cable-Driven Parallel Robots for additive manufacturing in architecture
Participant : Yves Papegay.
Easy to deploy and to reconfigure, dynamically efficient in large workspaces even with payloads, cable-driven parallel robots are very attractive for solving displacement and positioning problems in architectural building at scale 1 and seems to be a good alternative to crane and industrial manipulators in the area of additive manufacturing.
We have co-founded 2 years ago the XtreeE (xtreee.eu) start-up company that is currently one of the leading international actors in large-scale 3D concrete printing.
We have been scientific advisors of this company for the design of an innovative new large scale CDPR - but its development, scheduled this year, has been postponed for strategical reasons.