

Section: New Results
Virtual Reality Tools and Usages
Virtual Embodiment
Studying the Sense of Embodiment in VR Shared Experiences
Participants: Rebecca Fribourg, Ferran Argelaguet, Anatole Lécuyer
In [35], we explored the influence of sharing a virtual environment with another user on the sense of embodiment in virtual reality. For this aim, we conducted an experiment where users were immersed in a virtual environment while being embodied in an anthropomorphic virtual representation of themselves. To evaluate the influence of the presence of another user, two situations were studied: either users were immersed alone, or in the company of another user (see Figure 3). During the experiment, participants performed a virtual version of the well-known whac-a-mole game, therefore interacting with the virtual environment, while sitting at a virtual table. Our results show that users were significantly more “efficient” (i.e., faster reaction times), and accordingly more engaged, in performing the task when sharing the virtual environment, in particular for the more competitive tasks. Also, users experienced comparable levels of embodiment both when immersed alone or with another user. These results are supported by subjective questionnaires but also through behavioural responses, e.g. users reacting to the introduction of a threat towards their virtual body. Taken together, our results show that competition and shared experiences involving an avatar do not influence the sense of embodiment, but can increase user engagement. Such insights can be used by designers of virtual environments and virtual reality applications to develop more engaging applications.
This work was done with collaboration with Mimetic Inria team.
|

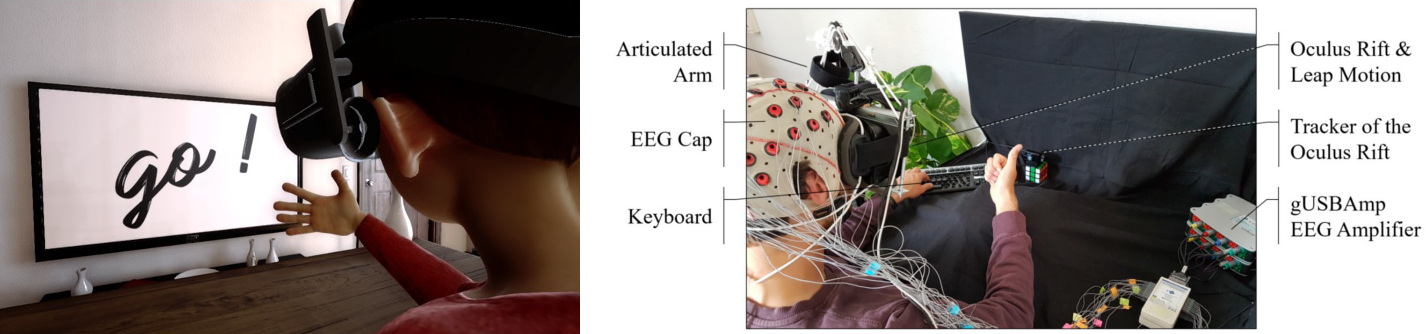
Towards Novel Approaches to Characterise, Manipulate and Measure the Sense of Agency in Virtual Environments
Participants: Camille Jeunet, Ferran Argelaguet, Anatole Lécuyer
While the Sense of Agency (SoA) has so far been predominantly characterised in VR as a component of the Sense of Embodiment, other communities (e.g., in psychology or neurosciences) have investigated the SoA from a different perspective proposing complementary theories. Yet, despite the acknowledged potential benefits of catching up with these theories a gap remains. In [18], we first aimed to contribute to fill this gap by introducing a theory according to which the SoA can be divided into two components, the feeling and the judgment of agency, and relies on three principles, namely the principles of priority, exclusivity and consistency. We argued that this theory could provide insights on the factors influencing the SoA in VR systems. Second, we proposed novel approaches to manipulate the SoA in controlled VR experiments (based on these three principles) as well as to measure the SoA, and more specifically its two components based on neurophysiological markers, using ElectroEncephaloGraphy (EEG). We claim that these approaches would enable us to deepen our understanding of the SoA in VR contexts. Finally, we validated these approaches in an experiment (see Figure 4). Our results (N=24) suggest that our approach was successful in manipulating the SoA as the modulation of each of the three principles induced significant decreases of the SoA (measured using questionnaires). In addition, we recorded participants’ EEG signals during the VR experiment, and neurophysiological markers of the SoA, potentially reflecting the feeling and judgment of agency specifically, were revealed. Our results also suggest that users’ profile, more precisely their Locus of Control (LoC), influences their level of immersion and SoA.
|
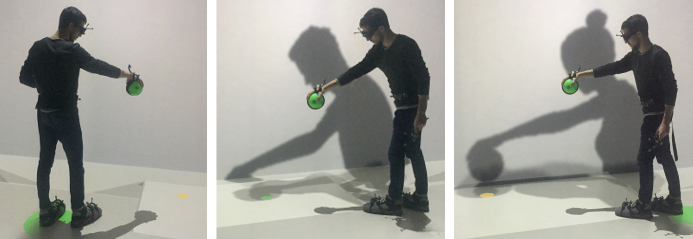
Virtual Shadows for Real Humans in a CAVE: Influence on Virtual Embodiment and 3D Interaction
Participants: Guillaume Cortes, Ferran Argelaguet, Anatole Lécuyer
In immersive projection systems (IPS), the presence of the user's real body limits the possibility to elicit a virtual body ownership illusion. But, is it still possible to embody someone else in an IPS even though the users are aware of their real body? In order to study this question, we proposed to consider using a virtual shadow in the IPS, which can be similar or different from the real user's morphology [29]. We conducted an experiment (N=27) to study the users' sense of embodiment whenever a virtual shadow was or was not present (see Figure 5). Participants had to perform a 3D positioning task in which accuracy was the main requirement. The results showed that users widely accepted their virtual shadow (agency and ownership) and felt more comfortable when interacting with it (compare to no virtual shadow). Yet, due to the awareness of their real body, the users have less acceptance of the virtual shadow whenever the shadow gender differs from their own. Furthermore, the results showed that virtual shadows increase the users' spatial perception of the virtual environment by decreasing the inter-penetrations between the user and the virtual objects. Taken together, our results promote the use of dynamic and realistic virtual shadows in IPS and pave the way for further studies on “virtual shadow ownership” illusion.
|
This work was done with collaboration with Rainbow Inria team.
Influence of Being Embodied in an Obese Virtual Body on Shopping Behavior and Products Perception in VR
Participants: Jean-Marie Normand, Guillaume Moreau
In [26], we studied the changes an obese virtual body has on products perception (e.g., taste, etc.) and purchase behavior (e.g., number purchased) in an immersive virtual retail store. Participants (of a normal BMI on average) were embodied in a normal (N) or an obese (OB) virtual body and were asked to buy and evaluate food products in the immersive virtual store (see Figure 6. Based on stereotypes that are classically associated with obese people, we expected that the group embodied in obese avatars would show a more unhealthy diet, (i.e., buy more food products and also buy more products with high energy intake, or saturated fat) and would rate unhealthy food as being tastier and healthier than participants embodied in “normal weight” avatars. Our participants also rated the perception of their virtual body: the OB group perceived their virtual body as significantly heavier and older. Stereotype activation failed for our participants embodied in obese avatars, who did not exhibit a shopping behavior following the (negative) stereotypes related to obese people. Participants might have rejected their virtual bodies when performing the shopping task, while the embodiment and presence ratings did not show significant differences, and purchased products based on their real (non-obese) bodies. This could mean that stereotype activation is more complex that previously thought.
|
VR and Building Information Modeling
OpenBIM-based Ontology for Interactive Virtual Environments
Participants: Anne-Solène Dris, François Lehericey, Valérie Gouranton, Bruno Arnaldi
We proposed an ontology improving the use of Building Information Modelling (BIM) models as an Interactive Virtual Environment (IVE) generator [33]. Our results enable to create a bidirectional link between the informed 3D database and the virtual reality application, and to automatically generate object-specific functions and capabilities according to their taxonomy. We presented an illustration of our results based on a Risk-Hunting training application. In such contexts, the notions of objects handling and scheduling of the construction are essential for the immersion of the future trainee as well as for the success of the training.
Risk-Hunting Training in Interactive Virtual Environments
Participants: Anne-Solène Dris, François Lehericey, Valérie Gouranton, Bruno Analdi
Safety is an everlasting concern in construction environments. In such applications, when an accident happens it is rarely harmless. To raise awareness and train workers to safety procedures, training centers propose risk-hunting courses in which real-life equipment is set up in an incorrect way. Trainees can safely observe these environments and are supposed to point at risk situations. In [34], we proposed a risk-hunting course in Virtual Reality. With VR, we can put the trainee in a full construction environment with potentially dangerous hazards without engaging his safety. Contrary to others risk-hunting courses, we have designed a virtual environment with interactions to emphasize the importance of learning to correct the errors. First, instead of only having to spot the errors, the trainee had to fix them. Then, a second way to exploit VR interaction capabilities consisted in introducing consequences of not fixing an error. For example, not fixing an error in a scaffolding would make it collapse later. This implies to rely on script-writing the virtual environment to add causality on specific actions. Our goal was here to educate the trainee about the dramatic consequences that could arise when errors are not corrected.
Augmented Reality Methods and Applications
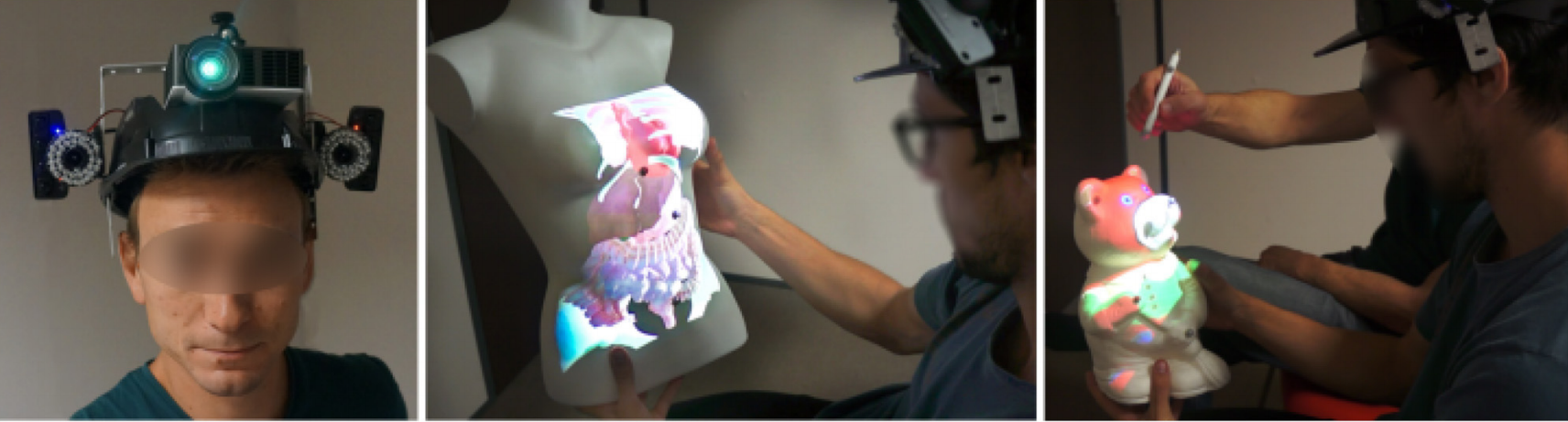
MoSART: Mobile Spatial Augmented Reality for 3D Interaction With Tangible Objects
Participants: Guillaume Cortes, Anatole Lécuyer
In [11] we introduced MoSART: a novel approach for Mobile Spatial Augmented Reality on Tangible objects. MoSART is dedicated to mobile interaction with tangible objects in single or collaborative situations. It is based on a novel “all-in-one” Head-Mounted Display (AMD) including a projector (for the SAR display) and cameras (for the scene registration). Equipped with the HMD the user is able to move freely around tangible objects and manipulate them at will. The system tracks the position and orientation of the tangible 3D objects and projects virtual content over them. The tracking is a feature-based stereo optical tracking providing high accuracy and low latency. A projection mapping technique is used for the projection on the tangible objects which can have a complex 3D geometry. Several interaction tools have also been designed to interact with the tangible and augmented content, such as a control panel and a pointer metaphor, which can benefit as well from the MoSART projection mapping and tracking features. The possibilities offered by our novel approach are illustrated in several use cases, in single or collaborative situations, such as for virtual prototyping, training or medical visualization.
|
This work was done with collaboration with Rainbow Inria team.
Evaluation of 2D and 3D Ultrasound Tracking Algorithms
Participants: Maud Marchal
Compensation for respiratory motion is important during abdominal cancer treatments. In [12], the results of the 2015 MICCAI Challenge on Liver Ultrasound Tracking are reported. These results extend the 2D results to relate them to clinical relevance in form of reducing treatment margins and hence sparing healthy tissues, while maintaining full duty cycle. The different methodologies of the MICCAI challenge are described for estimating and temporally predicting respiratory liver motion from continuous ultrasound imaging, used during ultrasound‐guided radiation therapy. Furthermore, the trade‐off between tracking accuracy and runtime in combination with temporal prediction strategies and their impact on treatment margins is also investigated. The paper follows the work of the PhD of Lucas Royer defended in 2016 and his methodology that was ranked first in the MICCAI challenge.
Evaluation of AR Inconsistencies on AR Placement Tasks: A VR Simulation Study
Participants: Romain Terrier, Jean-Marie Normand, Ferran Argelaguet
One of the major challenges of Augmented Reality (AR) is the registration of virtual and real contents. When errors occur during the registration process, inconsistencies between real and virtual contents arise and can alter user interaction. In this work, we assessed the impact of registration errors on the user performance and behaviour during an AR pick-and-place task in a Virtual Reality (VR) simulation [41]. The VR simulation ensured the repeatability and control over experimental conditions. The paper describes the VR simulation framework used and three experiments studying how registration errors (e.g., rotational errors, positional errors, shaking) and visualization modalities (e.g., transparency, occlusion) modify the user behaviour while performing a pick-and-place task. Our results show that users kept a constant behavior during the task, i.e., the interaction was driven either by the VR or the AR content, except if the registration errors did not enable to efficiently perform the task. Furthermore, users showed preference towards an half-transparent AR in which correct depth sorting is provided between AR and VR contents. Taken together, our results open perspectives for the design and evaluation of AR applications through VR simulation frameworks.
The 3DUI Contest 2018
Every year, the international IEEE Virtual Reality Conference organizes an annual 3D User Interfaces contest. This year, Hybrid submitted two different proposals.
Toward Intuitive 3D User Interfaces for Climbing, Flying and Stacking
Participants: Antonin Bernardin, Guillaume Cortes, Rebecca Fribourg, Tiffany Luong, Florian Nouviale, Hakim Si-Mohammed
|

In this first solution, we proposed 3D user interfaces that are adapted to specific Virtual Reality tasks: climbing a ladder using a puppet metaphor, piloting a drone thanks to a 3D virtual compass and stacking 3D objects with physics-based manipulation and time control [28]. These metaphors have been designed to provide the user with an intuitive, playful and efficient way to perform each task (see Figure 8).
Climb, Fly, Stack: Design of Tangible and Gesture-based Interfaces for Natural and Efficient Interaction
Participants: Alexandre Audinot, Emeric Goga, Vincent Goupil, Carl-Johan Jorgensen, Adrien Reuzeau, Ferran Argelaguet
In this second solution we proposed three different 3D interaction metaphors conceived to fulfill the three tasks proposed in the IEEE VR 3DUI Contest. We proposed the VladdeR, a tangible interface for Virtual laddeR climbing, the FPDrone, a First Person Drone control flying interface, and the Dice Cup, a tangible interface for virtual object stacking [27]. All three metaphors take advantage of body proprioception and previous knowledge of real life interactions without the need of complex interaction mechanics (see Figure 9): climbing a tangible ladder through arm and leg motions, control a drone like a child flies an imaginary plane by extending your arms or stacking objects as you will grab and stack dice with a dice cup.
