

Section: New Results
Physically-Based Simulation and Haptic Feedback
Haptic Methods and Rendering
KinesTouch: 3D Force-Feedback Rendering for Tactile Surfaces
Participants: Antoine Costes, Ferran Argelaguet, Anatole Lécuyer
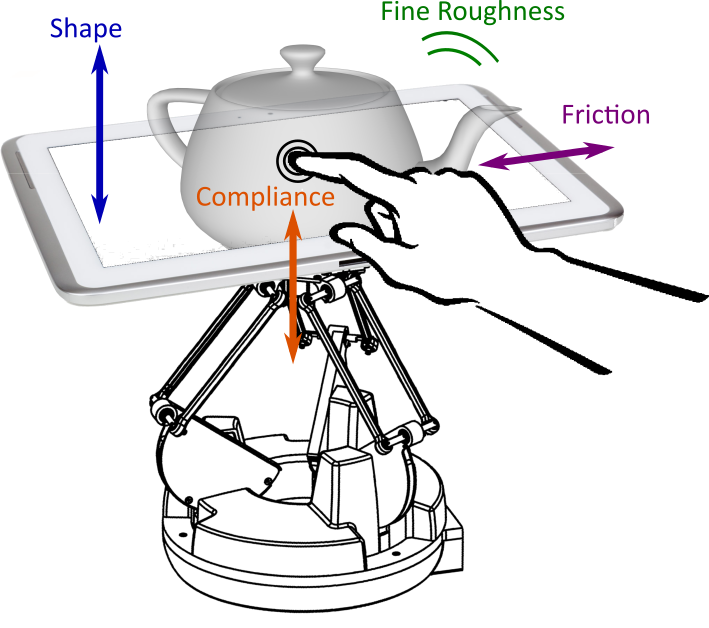
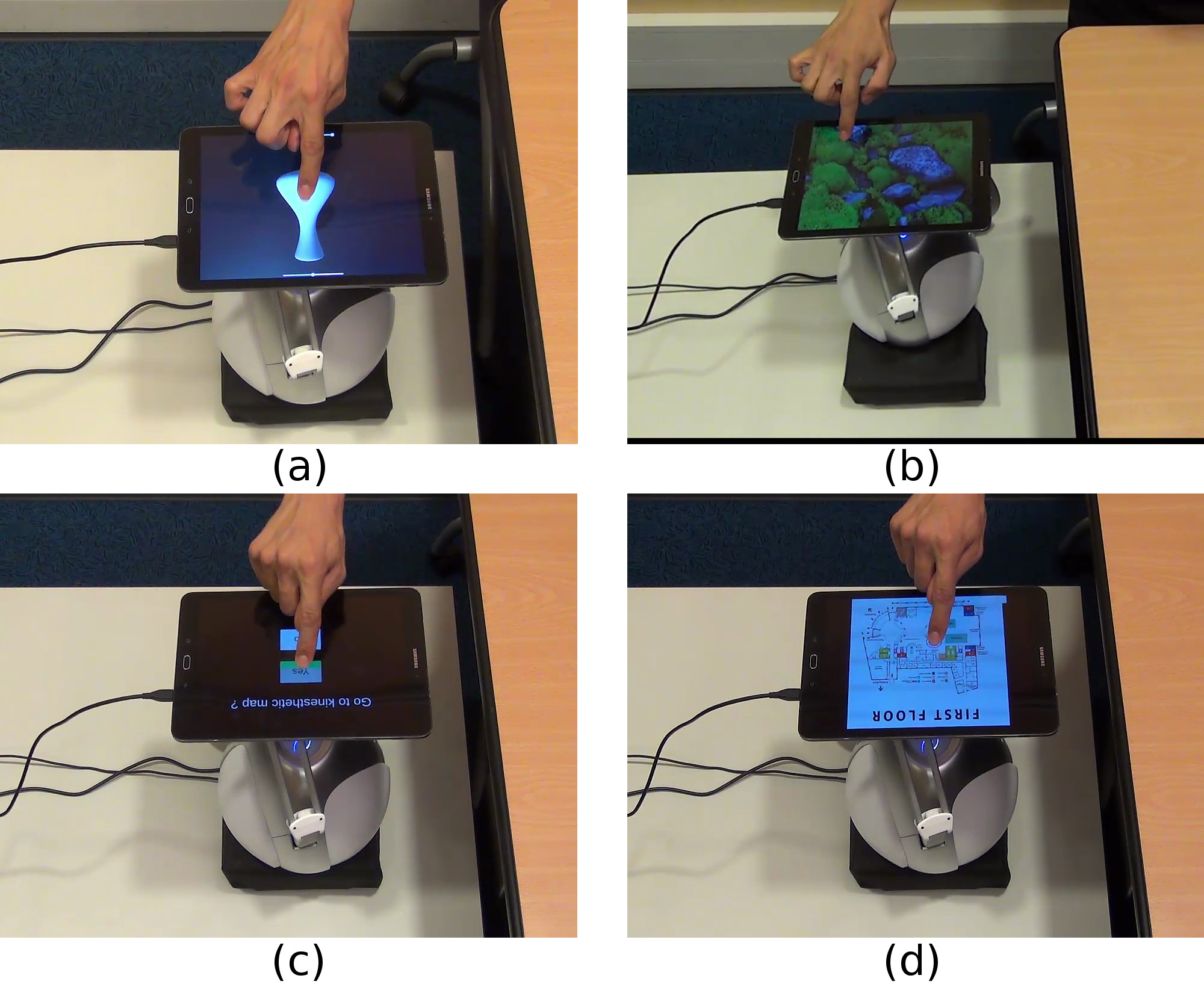
Haptic enhancement of touchscreens has been mostly addressed through the use of various types of vibrations, altering the physics of the finger sliding on the screen, in order to provide friction forces and even small relief sensations. However, such approaches do not allow for displaying other haptic properties such as stiffness or large-scale shapes. In [30], we introduced the "KinesTouch", a novel approach for touchscreen enhancement providing four types of haptic feedback with a single force-feedback device: compliance, friction, fine roughness, and shape. Regarding friction in particular, we proposed a novel effect based on large lateral motion that increases or diminishes the sliding velocity between the finger and the screen. Our results show that this effect is able to produce distinct sliding sensations. Our general approach is also illustrated through a set of interactive use cases of 2D/3D content manipulation in various contexts.
This work was done in collaboration with Technicolor.
|
Haptic Material: a Holistic Approach for Haptic Texture Mapping
Participants: Antoine Costes, Ferran Argelaguet, Anatole Lécuyer
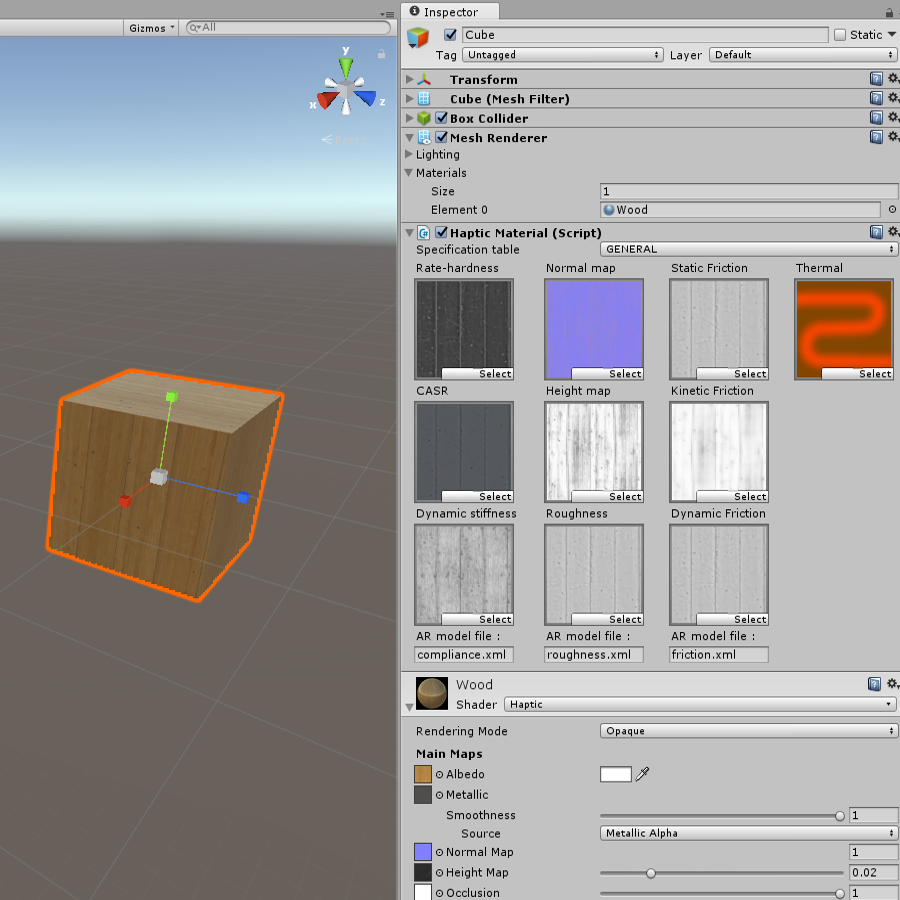
The development of 3D scanning technologies made common the digitizing of objects in realistic virtual copies, but still at the cost of most of their haptic properties. Besides, while haptic devices and setups spread widely, little attention is paid to the reuse and compatibility of haptic data, which are most of the time context- or hardware-specific. In [31], we proposed a new format for haptic texture mapping which is not dependent on the haptic rendering setup hardware. Our “haptic material” format encodes ten elementary haptic features in dedicated maps, similarly to “materials” used in computer graphics. These ten different features enable the expression of compliance, surface geometry and friction attributes through vibratory, cutaneous and kinesthetic cues, as well as thermal rendering. The diversity of haptic data allows various hardware to share this single format, each of them selecting which features to render depending on its capabilities.
This work was done in collaboration with Technicolor.
Combining Tangible Objects and Wearable Haptics
Participants: Xavier de Tinguy, Maud Marchal, Anatole Lécuyer
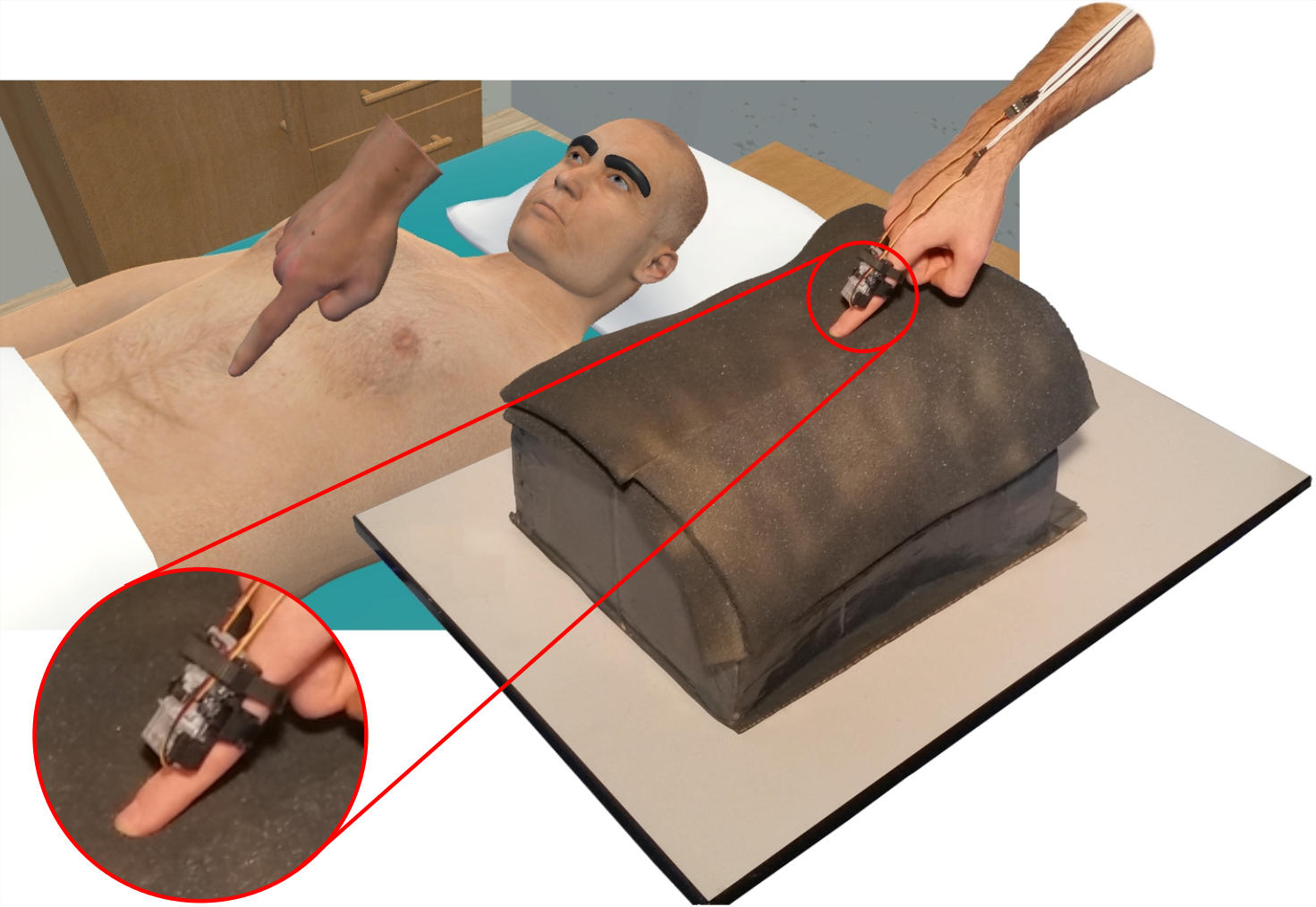
In [32], we studied the combination of tangible objects and wearable haptics for improving the display of stiffness sensations in virtual environments. Tangible objects enable to feel the general shape of objects, but they are often passive or unable to simulate several varying mechanical properties. Wearable haptic devices are portable and unobtrusive interfaces able to generate varying tactile sensations, but they often fail at providing convincing stiff contacts and distributed shape sensations. We propose to combine these two approaches in virtual and augmented reality (VR/AR), becoming able of arbitrarily augmenting the perceived stiffness of real/tangible objects by providing timely tactile stimuli at the fingers. We developed a proof-of-concept enabling to simulate varying elasticity/stiffness sensations when interacting with tangible objects by using wearable tactile modules at the fingertips. We carried out a user study showing that wearable haptic stimulation can well alter the perceived stiffness of real objects, even when the tactile stimuli is not delivered at the contact point. We illustrated our approach both in VR and AR, within several use cases and different tangible settings, such as when touching surfaces, pressing buttons and pistons, or holding an object (see Figure 12). Taken together, our results pave the way for novel haptic sensations in VR/AR by better exploiting the multiple ways of providing simple, unobtrusive, and low-cost haptic displays.
This work was done in collaboration with Rainbow Inria team.
|
Haptic Applications
A Survey on the Use of Haptic and Tactile Information in the Car to Improve Driving Safety
Participants: Yoren Gaffary, Anatole Lécuyer
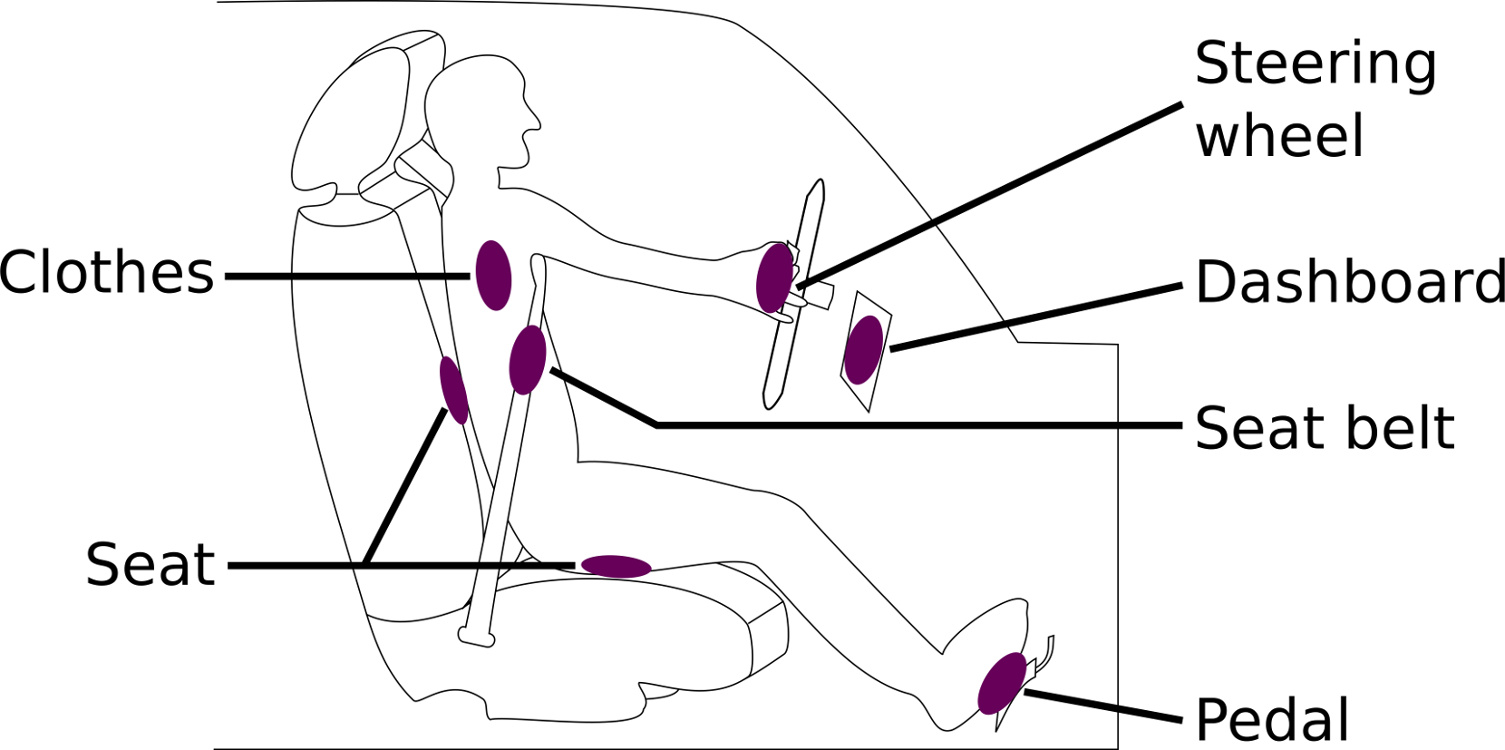
In [15], we presented an overview of haptic technologies deployed in cars and their uses to enhance drivers' safety during manual driving. These technologies enable to deliver haptic (tactile or kinesthetic) feedback at various areas of the car, such as the steering wheel or the pedal. The paper explores two main uses of the haptic modality to fulfill the safety objective: providing driving assistance and warning. Driving assistance concerns the transmission of information usually conveyed with other modalities for controlling the cars' functions, maneuvering support, and guidance. Warning concerns the prevention of accidents using emergency warnings, increasing the awareness of surroundings, and preventing collisions, lane departures, and speeding. This paper discusses how haptic feedback has been introduced so far for these purposes and provides perspectives regarding the present and future of haptic cars meant to increase drivers' safety.
|
Toward Haptic Communication and Tactile Alphabets
Participants: Yoren Gaffary, Maud Marchal, Fernando Argelaguet Sanz, Anatole Lécuyer
In [14], we studied the possibility to convey information using tactile stimulation on fingertips. We designed and evaluated three tactile alphabets which are rendered by stretching the skin of the index's fingertip: (1) a Morse-like alphabet, (2) a symbolic alphabet using two successive dashes, and (3) a display of Roman letters based on the Unistrokes alphabet. All three alphabets (26 letters each) were evaluated through a user study in terms of recognition rate, intuitiveness and learning. Participants were able to perceive and recognize the letters with very good results (80%-97% recognition rates). Tactile alphabets with representations closer to Roman alphabet seem easier to learn. Taken together, our results pave the way to novel kinds of information communication using tactile modality.
|
This work was done in collaboration with CEA LIST.